
Wanjun Liu, Mingyue Gao, Haicheng Qu, Lamei Liu. Light-Weight Multi-Object Detection Network Based on Inverted Residual Structure[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221003
- Laser & Optoelectronics Progress
- Vol. 56, Issue 22, 221003 (2019)
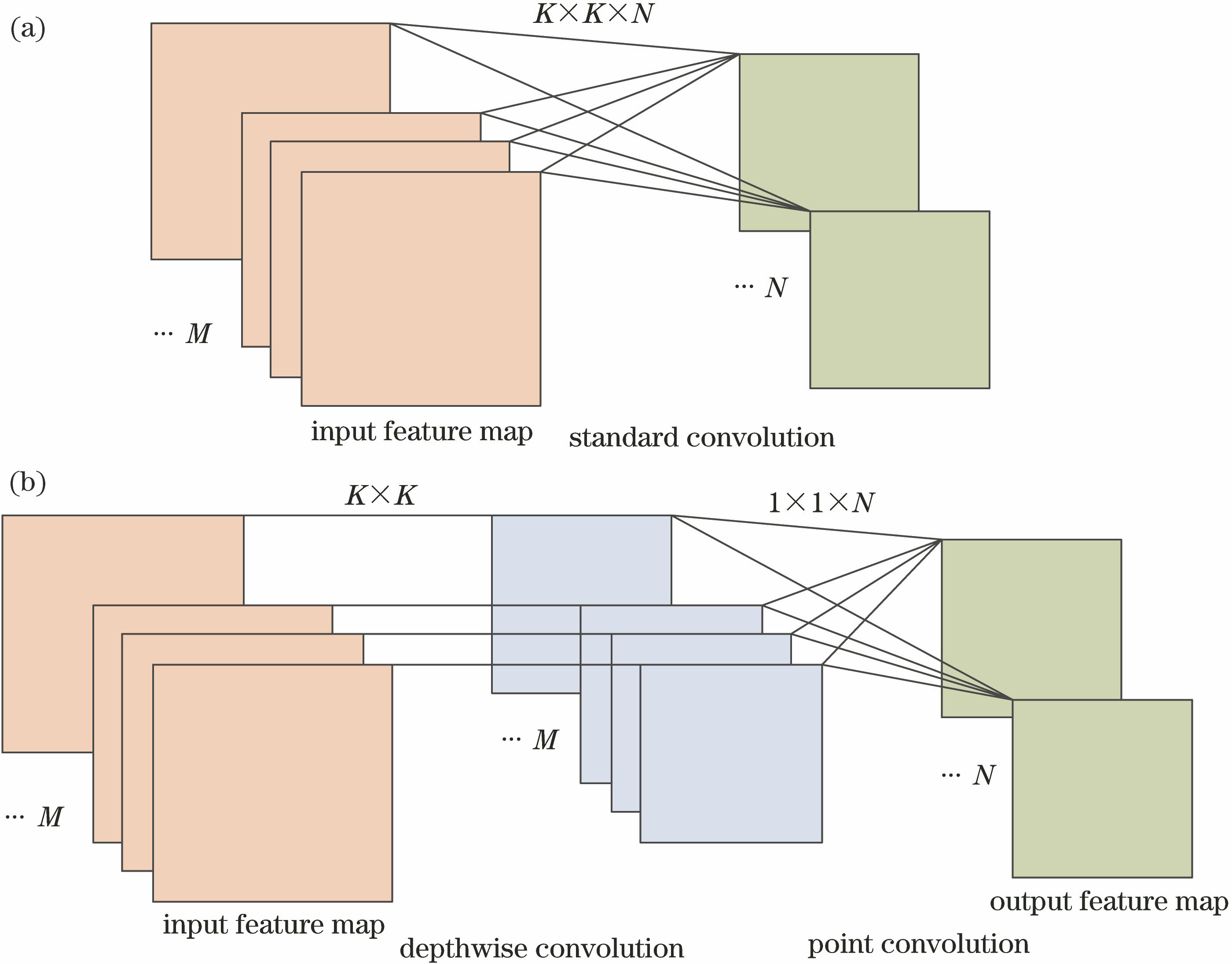
Fig. 1. Decoupling process of the depth separable convolution. (a) Standard convolution; (b) depth separable convolution
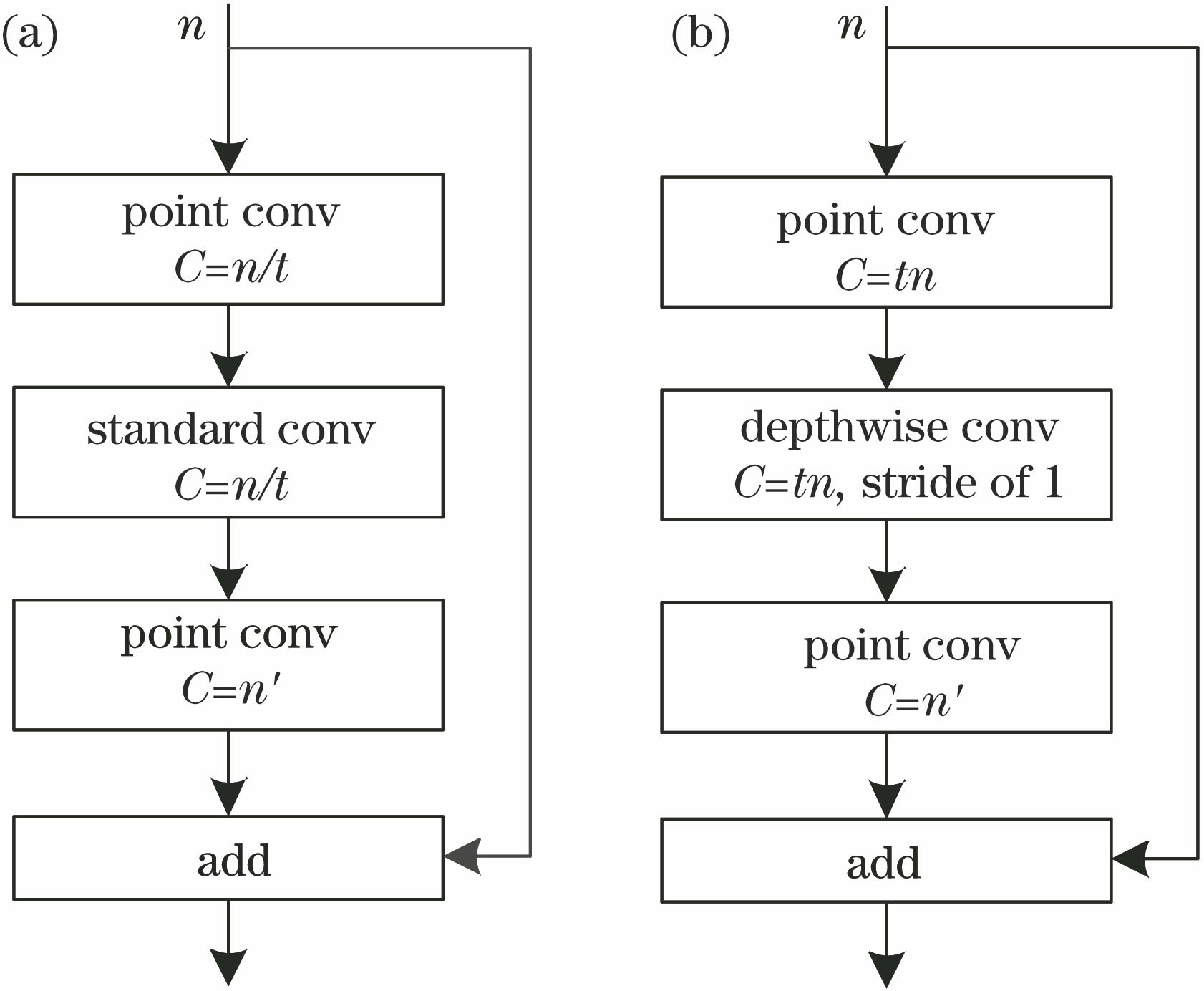
Fig. 2. Residual block and inverted residual block. (a) Residual block; (b) inverted residual block when stride is 1
Fig. 3. IR-YOLO network architecture
Fig. 4. Train loss curves
Fig. 5. Class detection accuracy histogram
Fig. 6. Comparison of detection results. (a)(d) Original input images ; (b)(e) detection results with YOLOv3-Tiny Model; (c)(f) detection results with IR-YOLO Model
|
Table 1. Parameters of inverted residual block
|
Table 2. VOC dataset
|
Table 3. Hyper parameters
| |||||||||||||||||||||||||||||||||||||||||||||
Table 4. Comparison on number of floating point operations
|
Table 5. Comparison detection speed of IR-YOLO model and YOLOv3-Tiny model
|
Table 6. Comparison mAP of different training numbers
|
Table 7. Comparison of detection results of IR-YOLO and YOLOv3-Tiny on VOC dataset%

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20