
Hongshe Dang, Xinrui Lu, Junlong Sun, Chengang Wu, Yafan Tao. Design of Vision-Based Drug-Grabbing Robot System[J]. Laser & Optoelectronics Progress, 2021, 58(2): 0210009
- Laser & Optoelectronics Progress
- Vol. 58, Issue 2, 0210009 (2021)
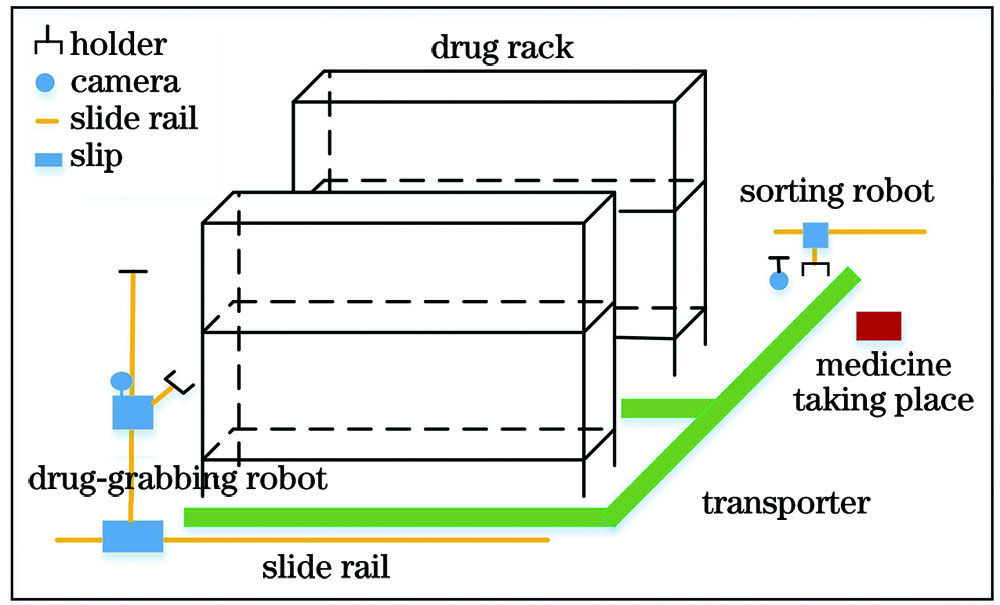
Fig. 1. Pharmacy layout

Fig. 2. Flow chart of drug recognition using AKAZE algorithm
Fig. 3. Flow chart for dynamic drug identification
Fig. 4. System test chart
Fig. 5. Host computer control interface
Fig. 6. Drug identification matching map
|
Table 1. Comparison of positioning errors

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20