
Rendong Wang, Hua Li, Kai Zhao, Youchun Xu. Robust Localization Based on Kernel Density Estimation in Dynamic Diverse City Scenes Using Lidar[J]. Acta Optica Sinica, 2019, 39(5): 0528003
- Acta Optica Sinica
- Vol. 39, Issue 5, 0528003 (2019)
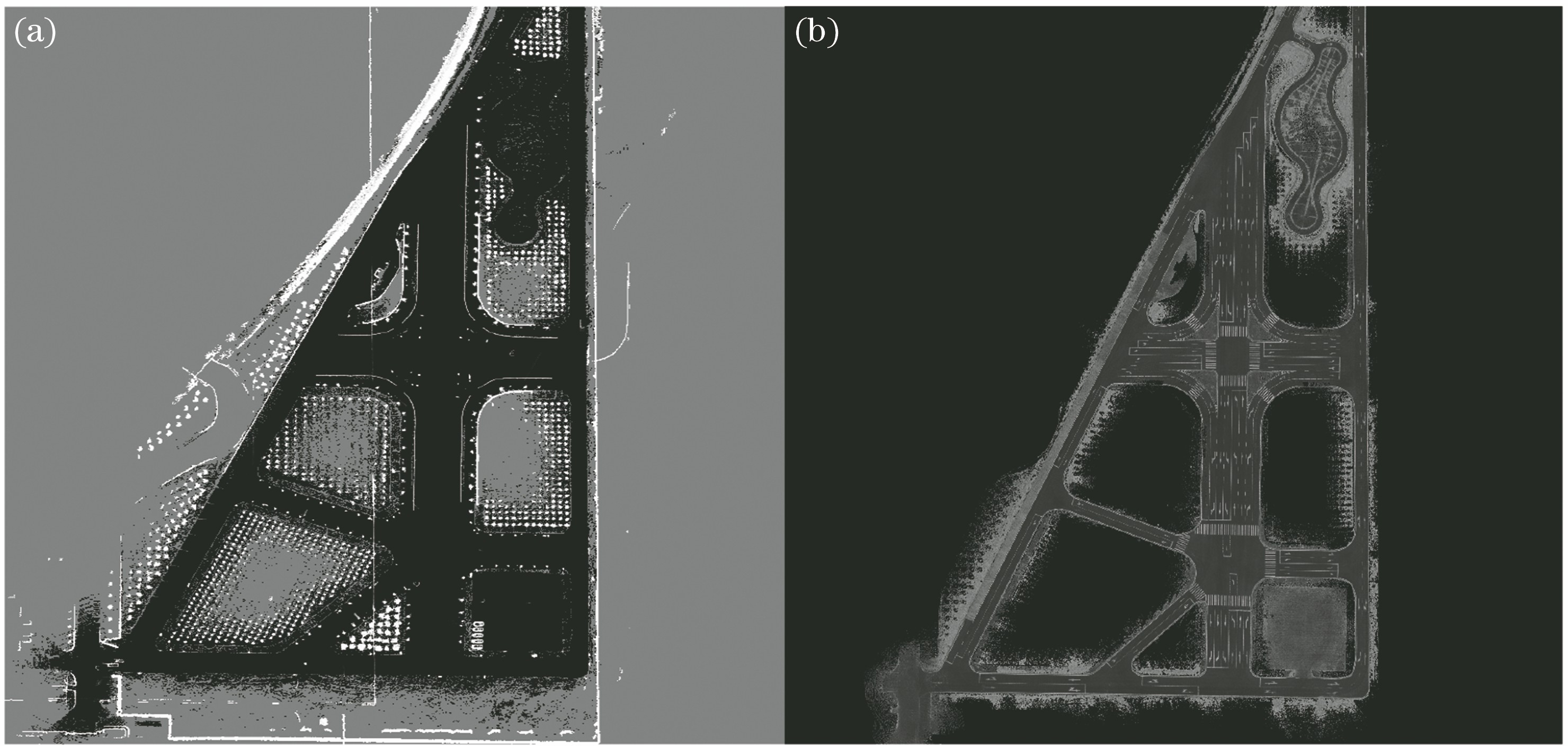
Fig. 1. High-accuracy maps constructed by proposed algorithm. (a) Height map; (b) reflectivity map
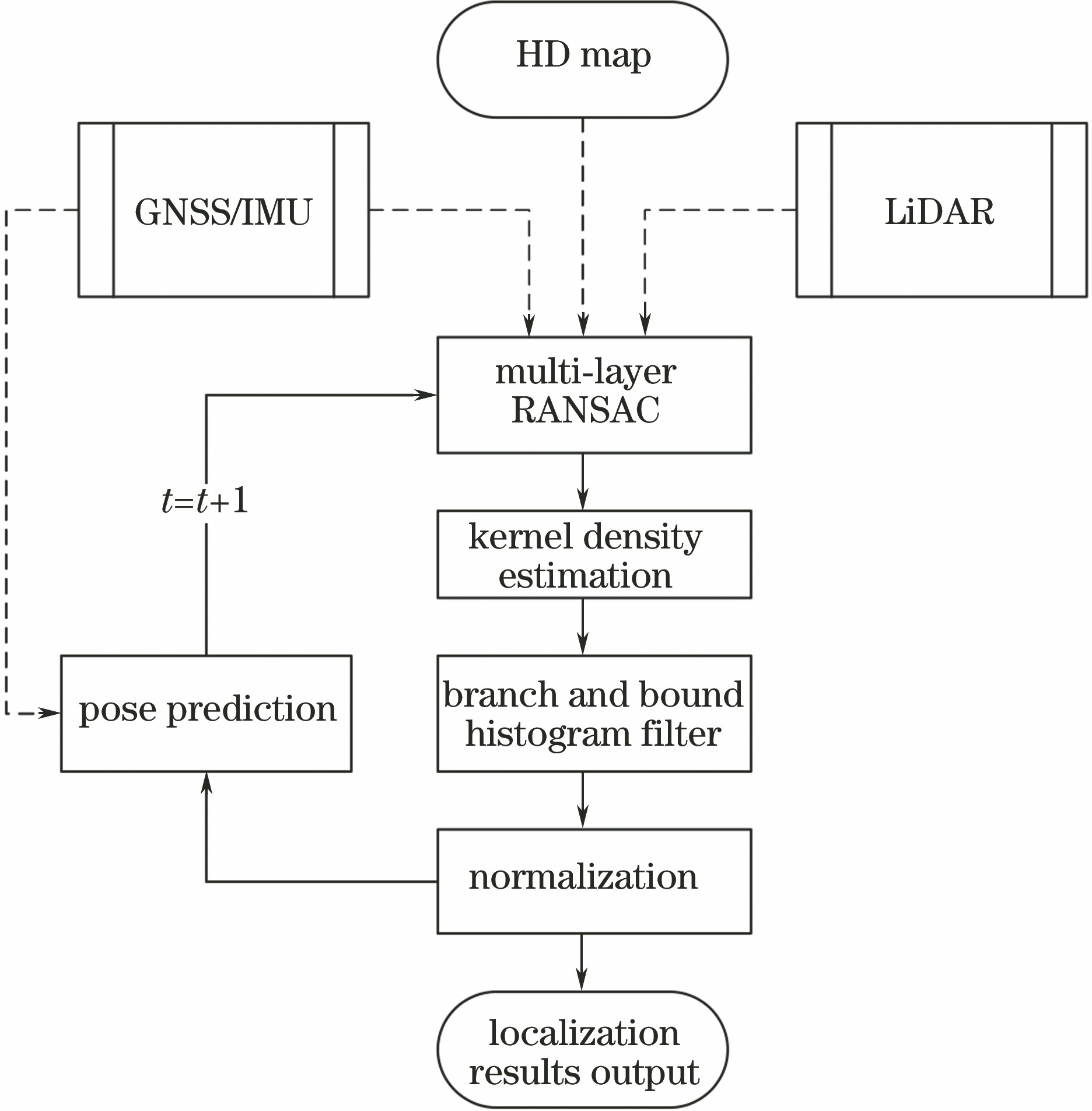
Fig. 2. Flow chart of proposed localization algorithm
Fig. 3. Satellite map of experimental section
Fig. 4. Moving trajectories before and after localization by proposed algorithm
Fig. 5. Comparison of localization results in experiment 1 by three algorithms. (a) Lateral error; (b) longitudinal error; (c) heading angle error
Fig. 6. Localization results of cross road. (a) Aerial view; (b) 3D view; (c) forward camera view; (d) HF algorithm; (e) ML-RANSAC algorithm; (f) proposed algorithm
Fig. 7. Localization results of straight road. (a) Aerial view; (b) 3D view; (c) forward camera view; (d) HF algorithm; (e) ML-RANSAC algorithm; (f) proposed algorithm
Fig. 8. Horizontal position error distributions by three algorithms under different initial pose deviations. (a) Scatter diagram; (b) histogram
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Localization statistical results by three algorithms under different initial pose deviations

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20