
Xiaoyu Wang, Xin Jin, Junqi Li. Blind position detection for large field-of-view scattering imaging[J]. Photonics Research, 2020, 8(6): 920
- Photonics Research
- Vol. 8, Issue 6, 920 (2020)
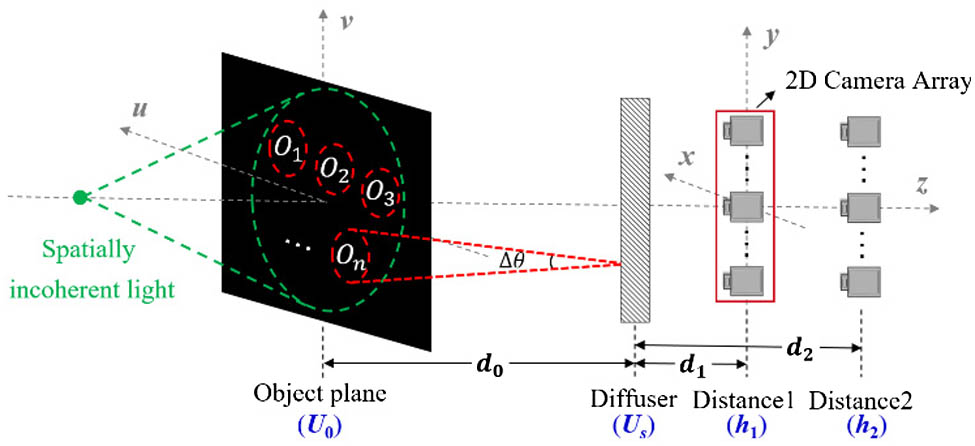
Fig. 1. Schematic of our multi-target large FOV scattering imaging system via the blind target position detection. Multiple isolated targets, O 1 , O 2 , … , O n
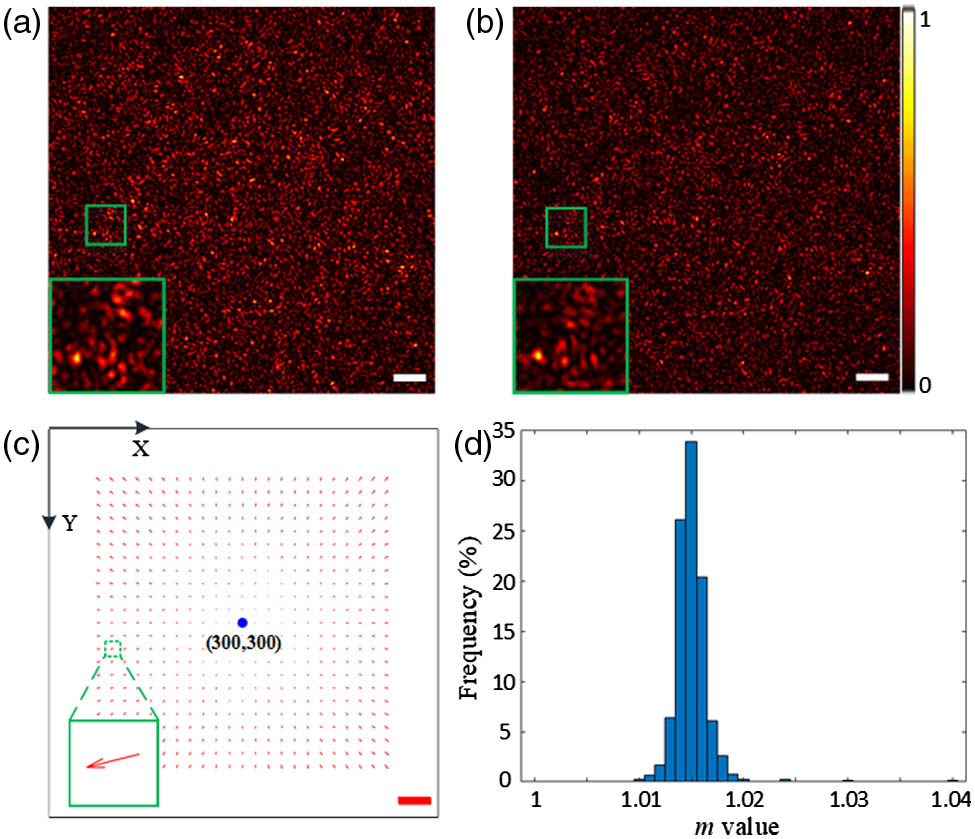
Fig. 2. Simulated experiments to analyze the relationship between two PSFs at different imaging distances (d 0 = 120 mm pixel size = 4.8 μm 600 × 600 u = 300 , v = 300 O k PSF d 1 k d 1 = 17 mm PSF d 2 k d 2 = 19 mm m
Fig. 3. The block diagram of the scaling-vector-based detection algorithm.
Fig. 4. Multi-target large FOV scattering imaging system setup via the blind target position detection.
Fig. 5. Tests on a real scattering imaging system. (a) The multi-target mask “2FL” with the detailed parameters as the imaging targets. (b) The final large FOV reconstruction with the detected position information. (c) The captured near-field speckle with d 2 = 17.0 mm d 1 = 16.5 mm
Fig. 6. Real tests for biological scattering observation. (a) The neuron-shape mask with the detailed parameters as the imaging targets. (b) The final reconstructed scene. (c) The captured near-field speckle with d 1 = 16.5 mm
Fig. 7. Real reconstructions for mask “2FL” when the spacing is decreasing from 3.25 mm to 1.5 mm. (a) The original imaging targets with detailed distance parameters. (b) The final reconstructed large FOV scenes corresponding to (a). (c) The averaged PSNRs curve between reconstructions and original targets with respect to the decreasing spacing. (d) The estimated scaling vectors and locations when spacing equals 2.75 mm as an example of reconstructions in good quality. (e) The estimated scaling vectors and locations when spacing equals 1.75 mm as an example of degraded reconstructions.
|
Table 1. PSNRs Between Reconstructions and Targets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20