
Siyuan Li, Jin Liu, Haima Yang, Haishan Liu. Point Cloud Coarse Registration Algorithm Based on Two-Stage Coordinate Transformation[J]. Laser & Optoelectronics Progress, 2022, 59(16): 1610005
- Laser & Optoelectronics Progress
- Vol. 59, Issue 16, 1610005 (2022)
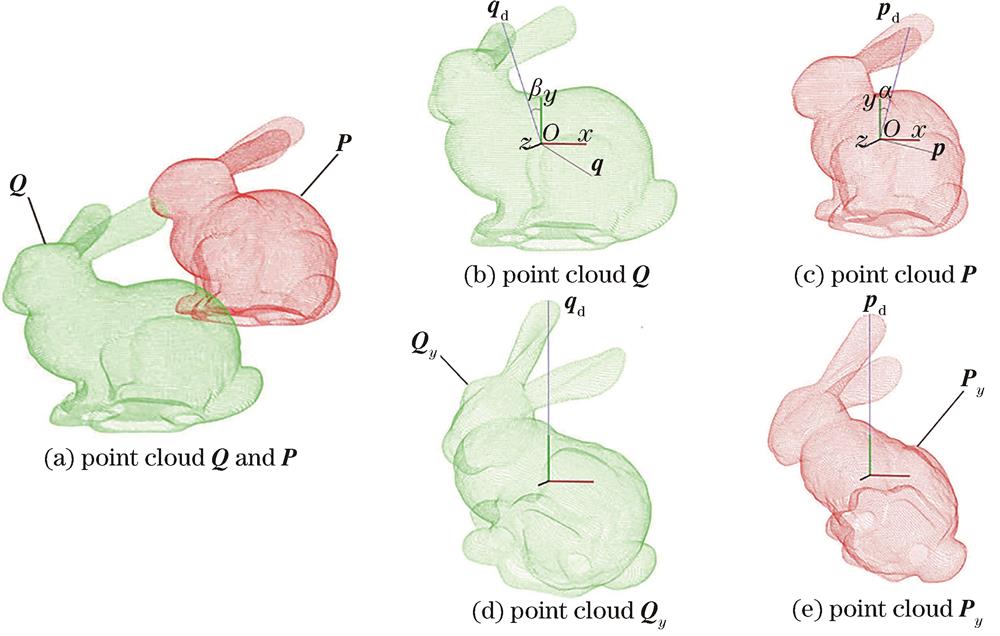
Fig. 1. Vertical registration process
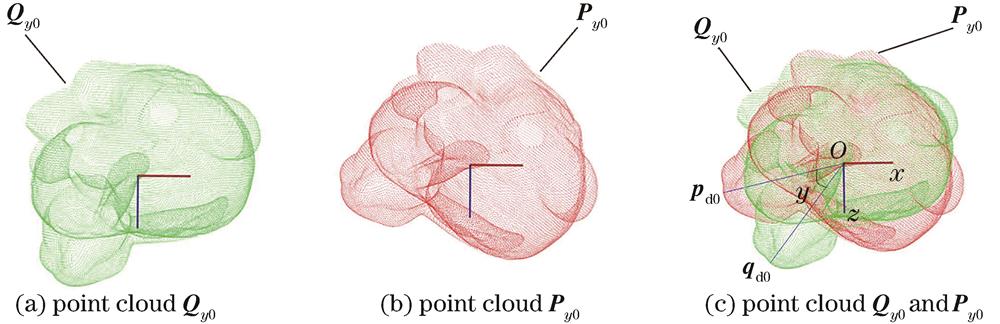
Fig. 2. Horizontal registration process
Fig. 3. Experimental setup for point cloud measurement
Fig. 4. Experiment results of Bunny point cloud
Fig. 5. Experiment results of Horse point cloud
Fig. 6. Experiment results of Cochlea point cloud
Fig. 7. Registration results of different algorithms. (a) Time; (b) RMSE
Fig. 8. Point cloud S and point cloud T
Fig. 9. Coarse registration process
Fig. 10. Registration result
|
Table 1. Comparison of Bunny point cloud registration of different algorithms
|
Table 2. Comparison of Horse point cloud registration of different algorithms
|
Table 3. Comparison of Cochlea point cloud registration of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20