
Mashuang Ma, Xiaogang Yang, Chuanxiang Li, Naixin Qi, Ping Song. Accurate Calibration Method for Non-Overlapping Fields of Cameras Based on Spatial Constraints[J]. Acta Optica Sinica, 2019, 39(10): 1015003
- Acta Optica Sinica
- Vol. 39, Issue 10, 1015003 (2019)
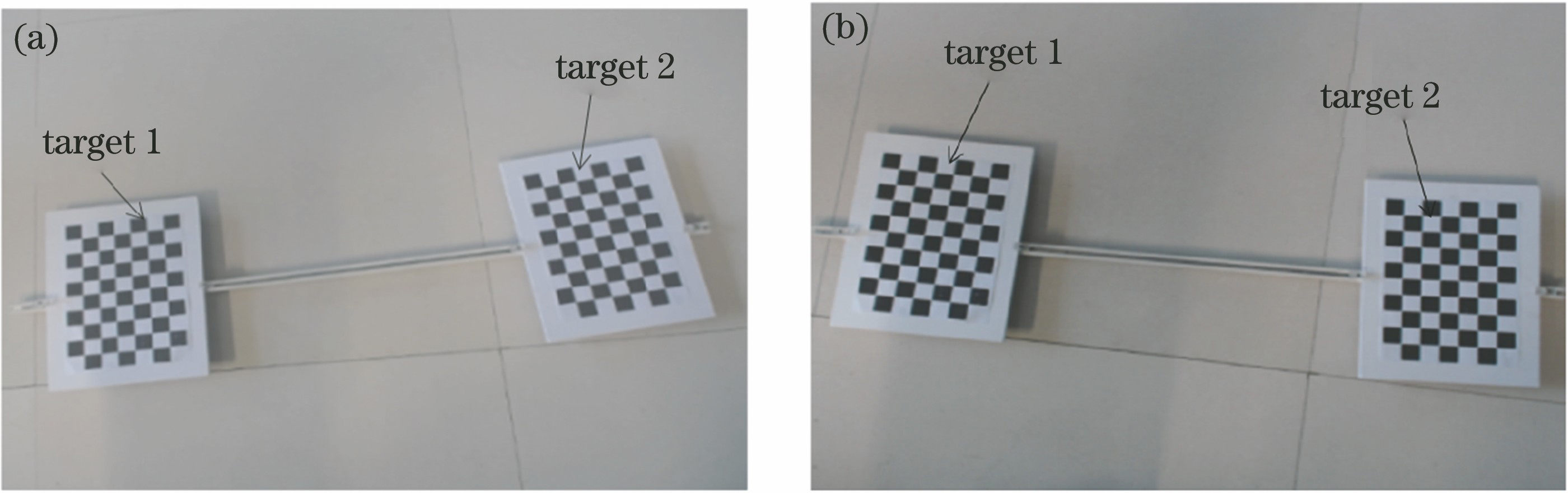
Fig. 1. Solution of transformation matrix between two small targets. (a) Position 1; (b) position 2
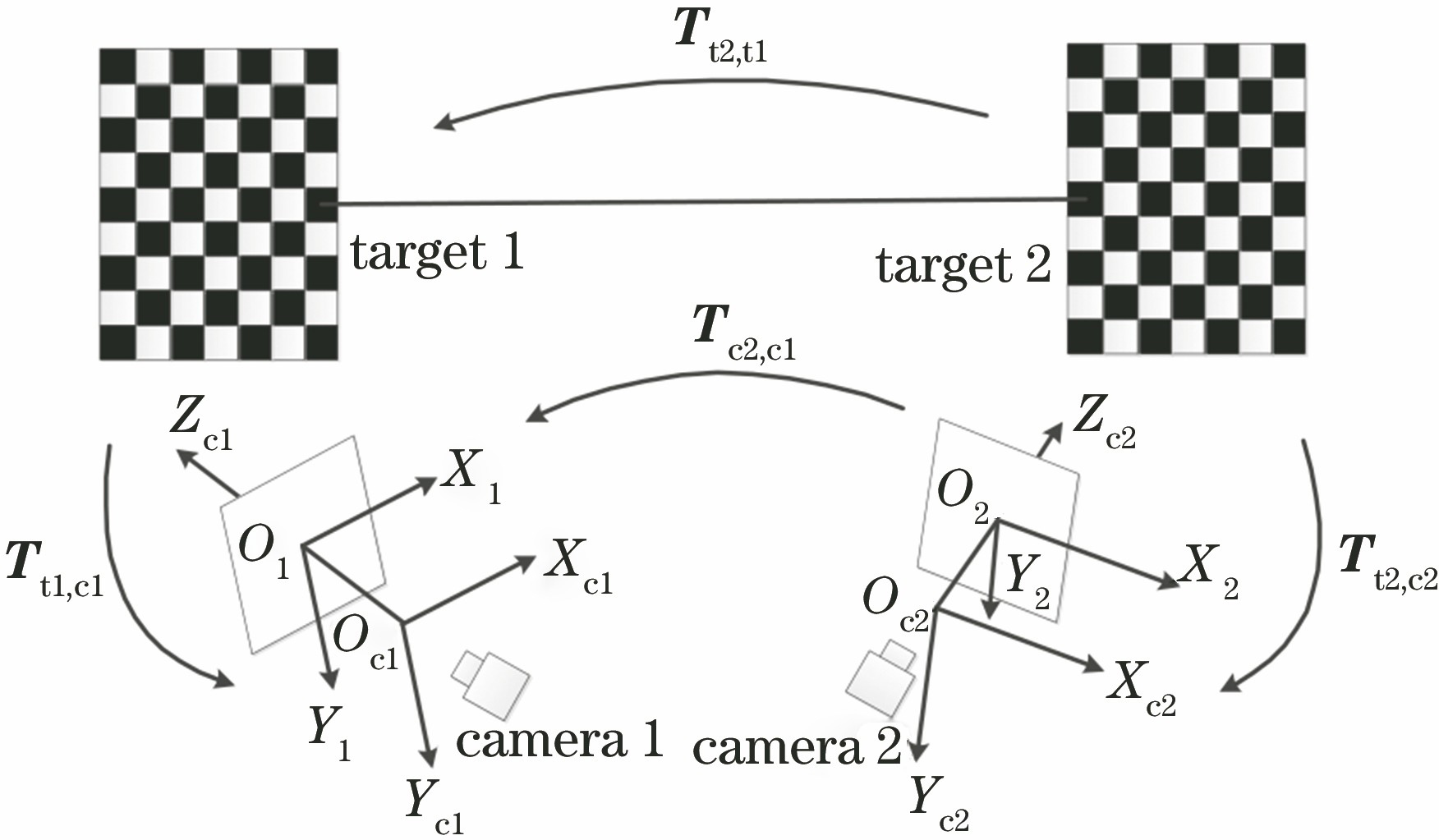
Fig. 2. Diagram of global calibration for non-overlapping FOV cameras
Fig. 3. Flowchart of proposed algorithm
Fig. 4. Experimental setup. (a) Measure system; (b) images captured by camera 1; (c) images captured by camera 2
Fig. 5. Measurement errors of different positions between two targets. (a) X axis; (b) Y axis
Fig. 6. Measurement error under different Gauss white noise. (a) X axis; (b) Y axis
Fig. 7. Global calibration for non-overlapping FOV cameras by using mobile robot platform. (a) TurtleBot mobile robot; (b) global calibration platform
Fig. 8. Measurement error of relative distance of markers
|
Table 1. Reprojection errors for non-overlapping FOV cameras

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20