
Yan XIAO, Bin WANG. PolSAR image classification based on object-oriented technology [J]. Journal of Infrared and Millimeter Waves, 2020, 39(4): 505
- Journal of Infrared and Millimeter Waves
- Vol. 39, Issue 4, 505 (2020)
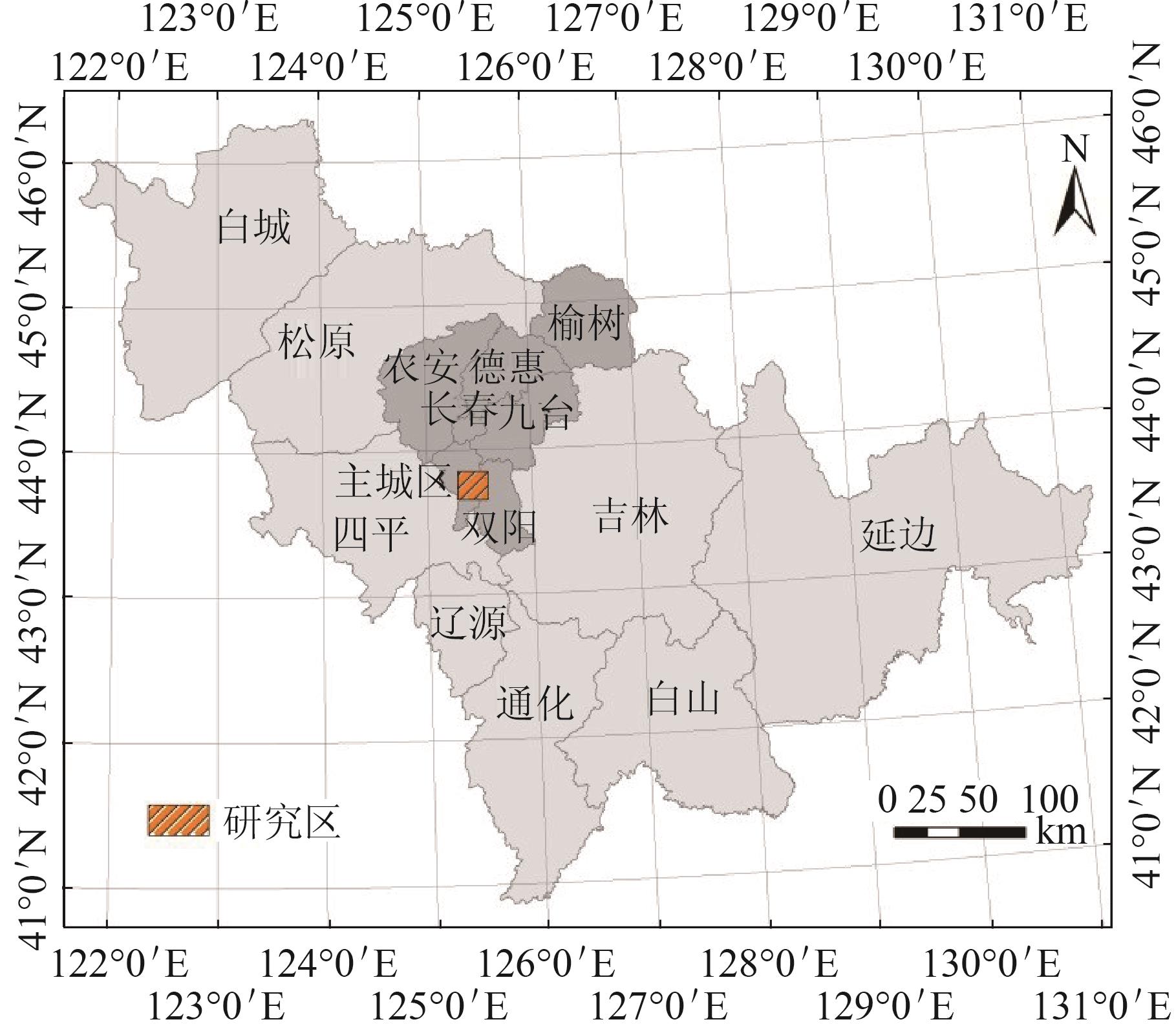
Fig. 1. Location map of study area
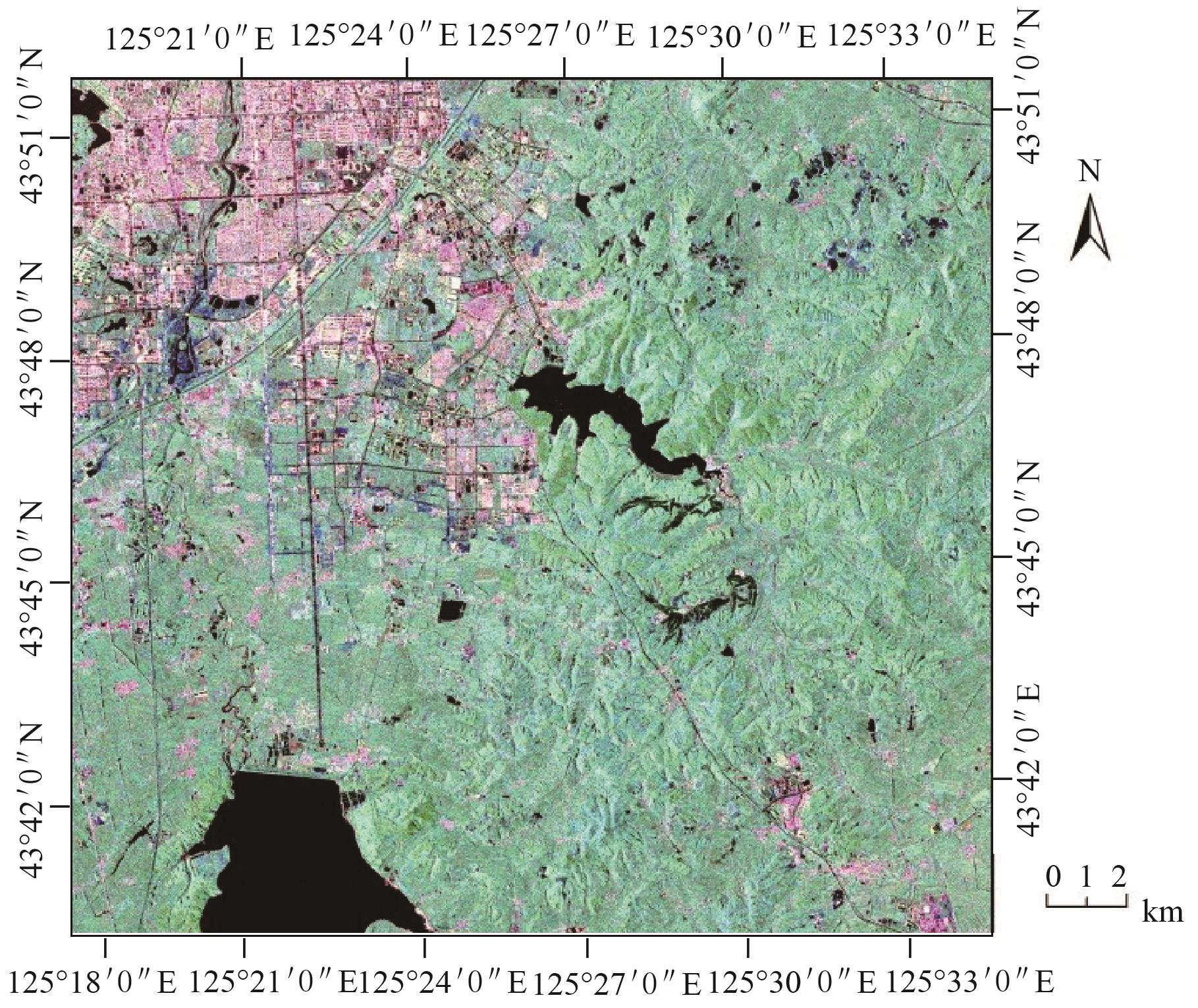
Fig. 2. RADARSAT-2 image (Pauli RGB composition).
Fig. 3. Distribution map of samples for each class
Fig. 4. Comparison of accuracies for classifications
Fig. 5. Land-use maps based on different classification methods
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. 极化分解方法及相应的极化参数
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. 分类结果的混淆矩阵
|
Table 3. 不同分类方法的分类精度对比

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20