
Peigen Ye, Ze Yang, Yanbiao Sun, Jigui Zhu. Oblique Image Orientation Method Based on Local-to-Global Optimization Strategy[J]. Acta Optica Sinica, 2021, 41(14): 1415001
- Acta Optica Sinica
- Vol. 41, Issue 14, 1415001 (2021)
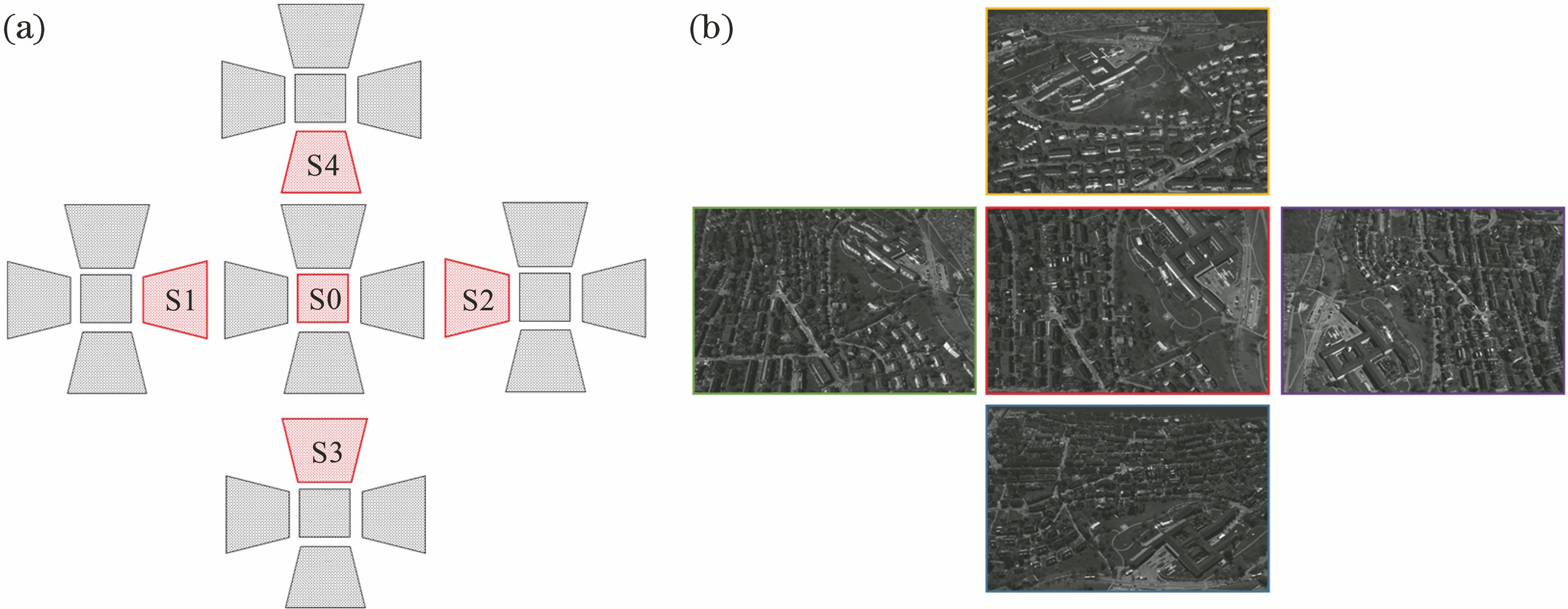
Fig. 1. Working principle of five camera oblique photography device. (a) Five images captured in 3D object space; (b) plane-directional distribution of five images captured on an exposure station
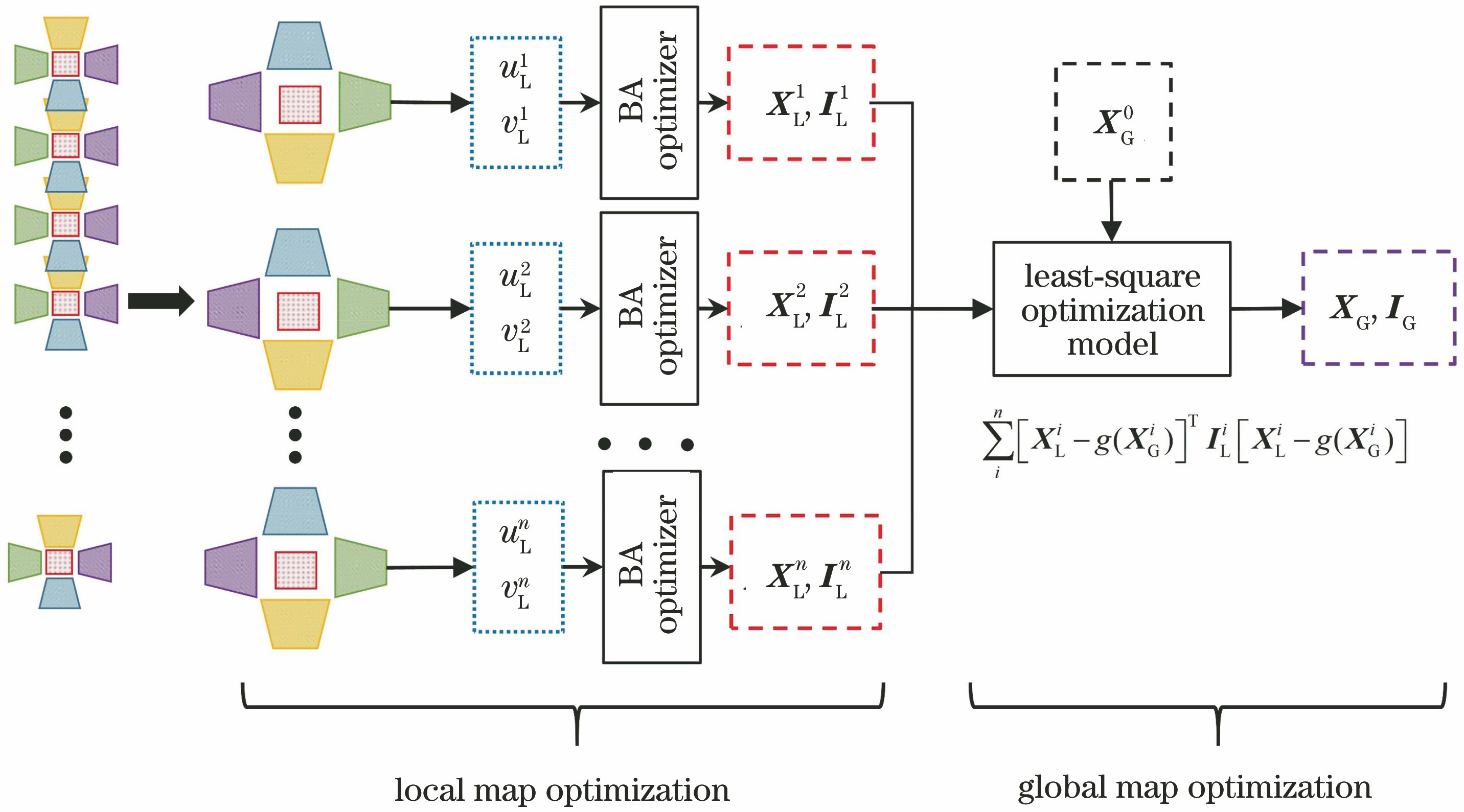
Fig. 2. There is a large overlap between the images on five different exposure stations. (a) Plane-directional distribution of the five exposure stations; (b) an example of local map from ISRPS EuroSDR dataset
Fig. 3. Principle structure of the LGO method
Fig. 4. Combining all local maps into a global map by a least-square optimization
Fig. 5. Spatial distribution of the exposure stations over the observed terrain
Fig. 6. Trajectories of the nadir cameras of the exposure stations
Fig. 7. Change of MSE with the number of iterations. (a) MSE of the BA method; (b) MSE of the LGO method
Fig. 8. Residual of all estimated camera positions
Fig. 9. Distribution of the 135 Zurich images and the construction of local maps
Fig. 10. Trajectories for the Zurich data. (a) Trajectory of only nadir images; (b) Trajectory of both nadir and side images
Fig. 11. Change of MSE with the number of iterations on the Zurich dataset. (a) BA method; (b) LGO method
Fig. 12. Residual of 135 Zurich images estimated by the BA and LGO methods. (a) X direction; (b) Y direction; (c) Z direction; (d) 3D
|
Table 1. Parameters of the large scale simulated dataset
|
Table 2. RMSE of camera positions estimated by the BA and the LGO methodsunit: m
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Results of BA and LGO methods on the large scale simulated dataset with initialization noise
|
Table 4. Overall parameters of the used Zurich dataset
|
Table 5. Parameters of the BA method and the proposed method for Zurich data
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 6. Results of BA and LGO methods on the Zurich dataset with initialization noise

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20