
Chengbin Xing, Xingsheng Deng, Kang Xu. Improved Moving Surface Algorithm Based on Confidence Interval Estimation Theory[J]. Acta Optica Sinica, 2020, 40(3): 0328001
- Acta Optica Sinica
- Vol. 40, Issue 3, 0328001 (2020)

Fig. 1. Creating map area based on coordinate extreme values
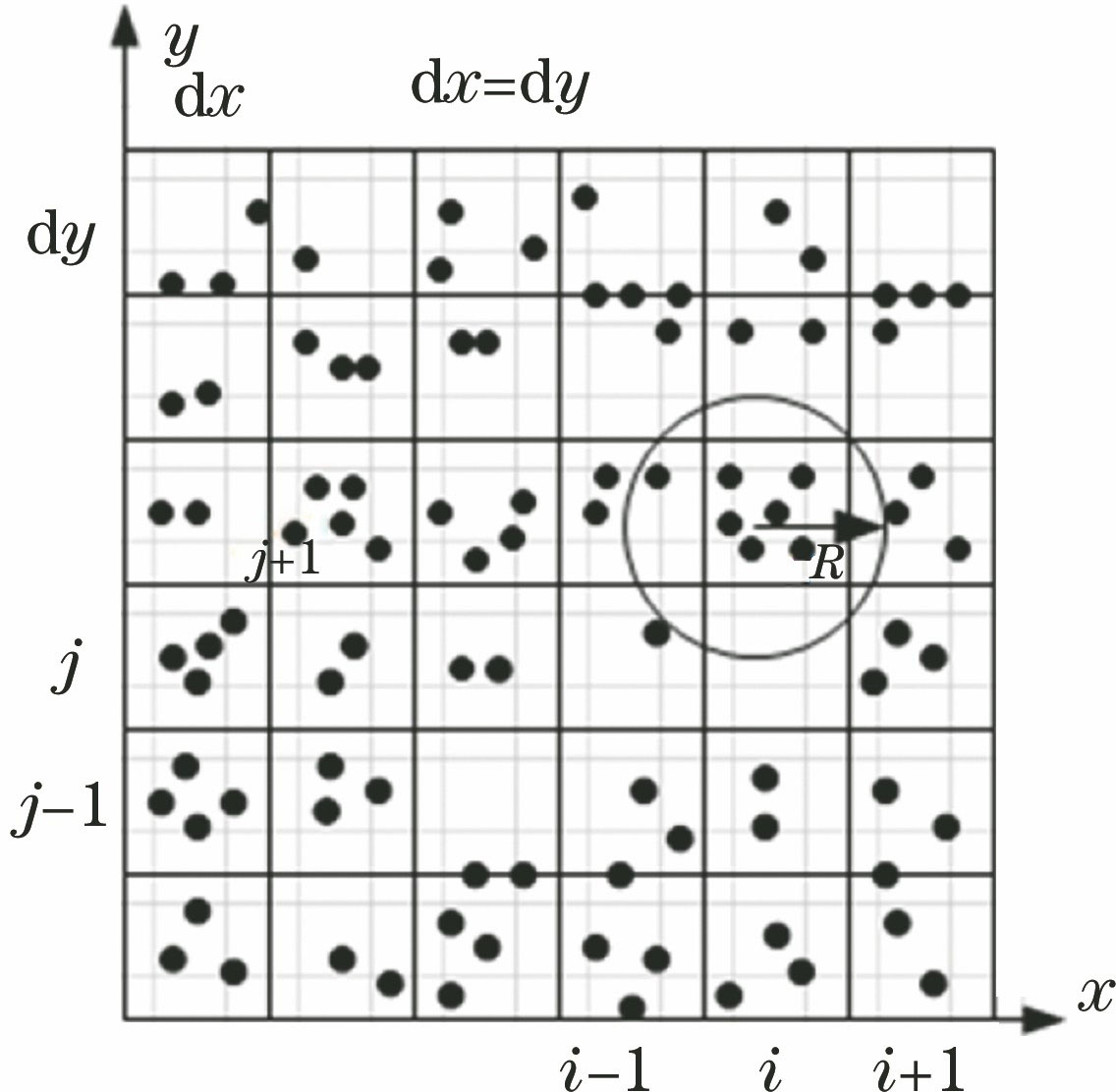
Fig. 2. Established grid index diagram
Fig. 3. Distribution of seed points in small grid
Fig. 4. Quadric surface fitted by seed points in small grid
Fig. 5. Index grids
Fig. 6. Small grid in large grid
Fig. 7. Distances between other points and plane ΔACD
Fig. 8. Distances between other points and plane ΔADE
Fig. 9. Flow chart of improved filtering algorithm
Fig. 10. Distribution of feature points and ground points before filtering
Fig. 11. Ground point distribution after filtering
Fig. 12. Ground point distribution of elevation difference between real terrain and fitted terrain
Fig. 13. Distribution of feature points and ground points under threshold conditions
Fig. 14. Distribution of feature points and ground points of Sample41 before filtering
Fig. 15. Ground point distribution of Sample41 after filtering
Fig. 16. Distribution of elevation difference between real terrain and fitted terrain of Sample41
Fig. 17. Distribution of Sample41 feature points and ground points under threshold condition
Fig. 18. Ground point distribution after filtering by improved moving surface algorithm
Fig. 19. Distribution of ground points after filtering by classical moving surface algorithm
|
Table 1. Test dataset and sample attributes released by ISPRS
| |||||||||||||||||||
Table 2. Definition of filter error
|
Table 3. Number of ground and non-ground points in the sample survey area and three types of error ratio
|
Table 4. Comparison of accuracies of 4 filter algorithms%
|
Table 5. Statistics of three types of error of improved algorithm and classical algorithm for Sample51%


Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20