
Renzhong Li, Yangyang Liu, Man Yang, Huanhuan Zhang. Three-Dimensional Point Cloud Segmentation Algorithm Based on Improved Region Growing[J]. Laser & Optoelectronics Progress, 2018, 55(5): 051502
- Laser & Optoelectronics Progress
- Vol. 55, Issue 5, 051502 (2018)
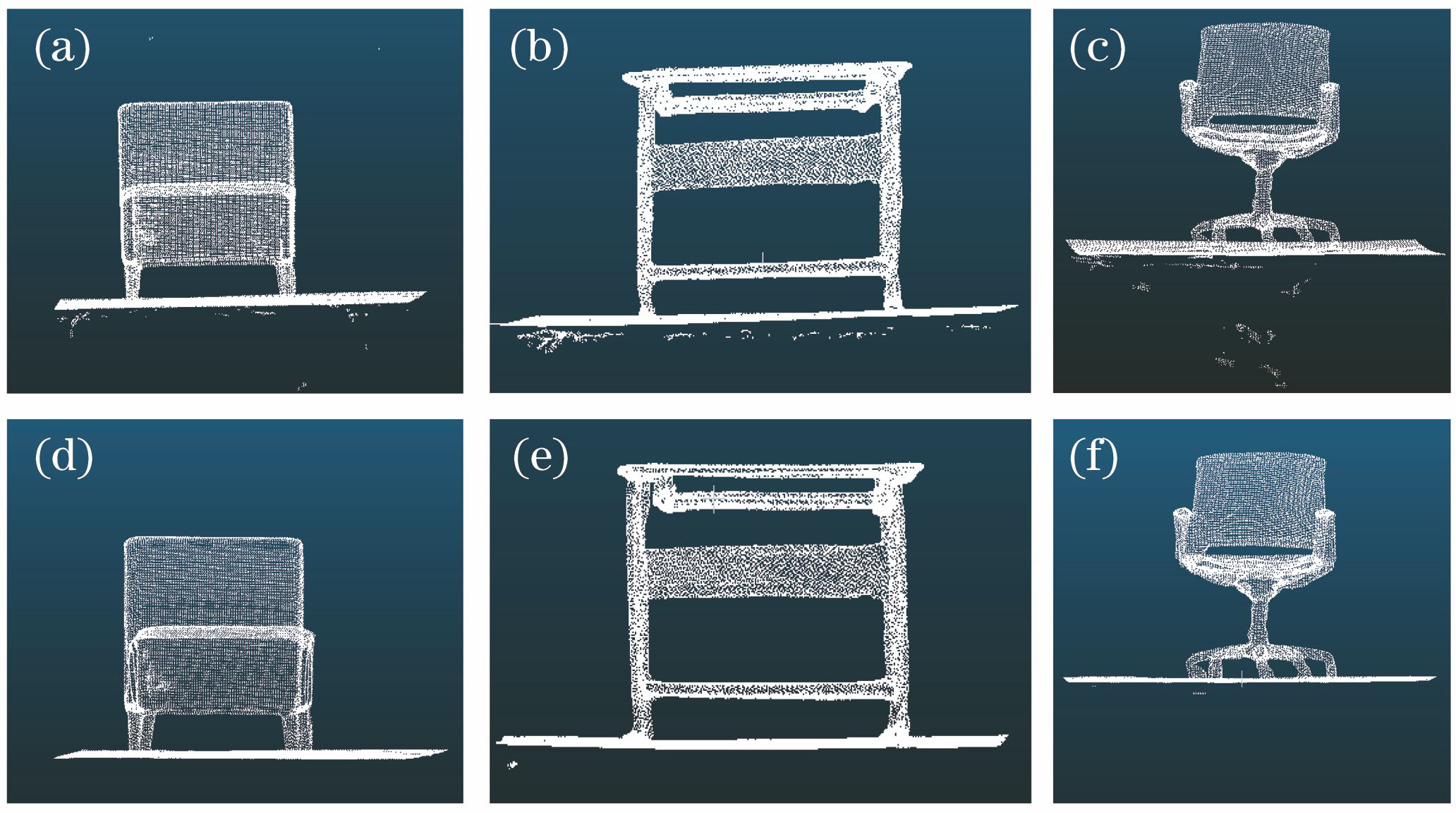
Fig. 1. Comparison results before and after statistical filtering. (a) Sofa before filtering; (b) table before filtering; (c) chair before filtering; (d) sofa after filtering; (e) table after filtering; (f) chair after filtering
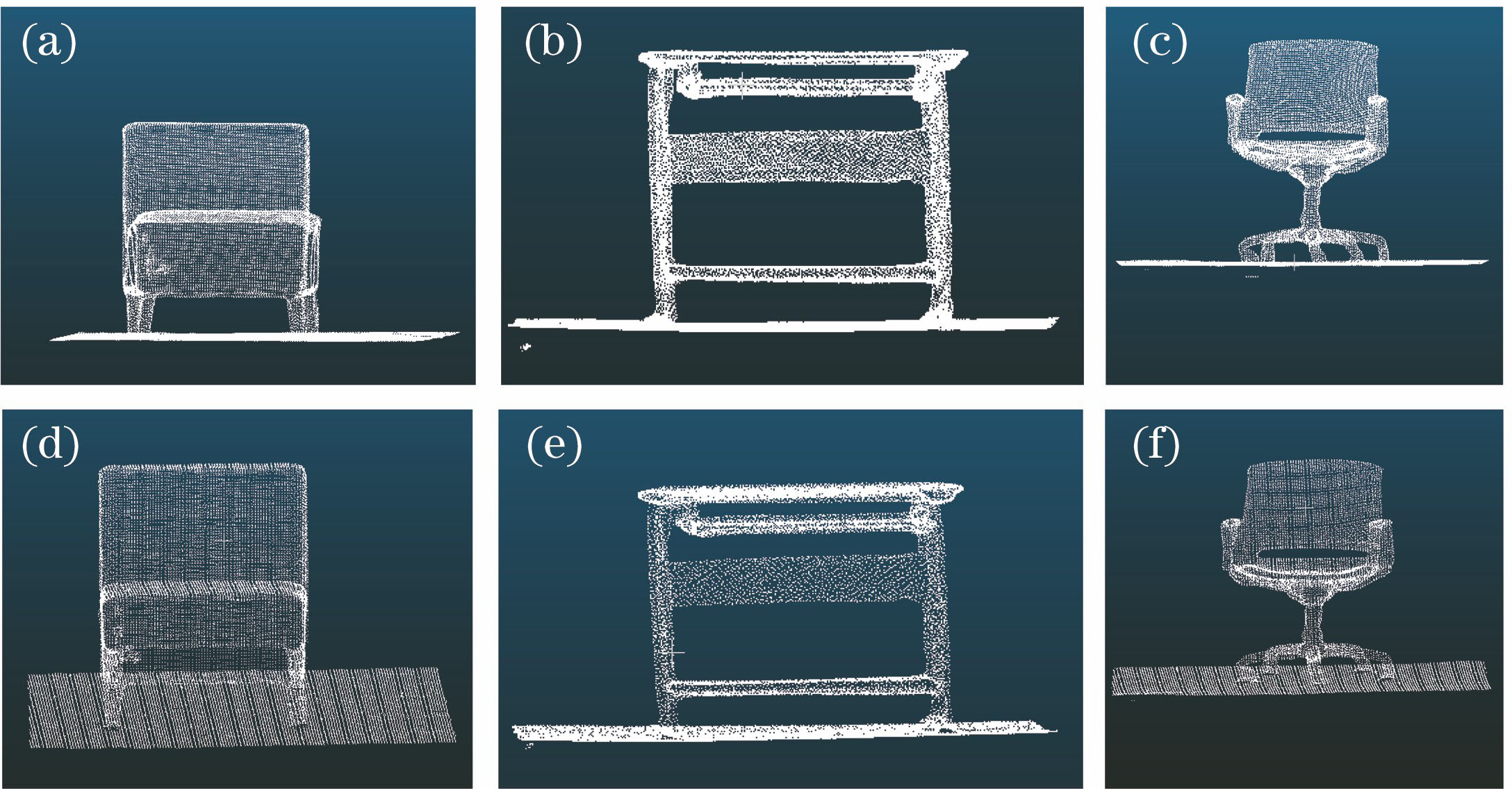
Fig. 2. Comparison results before and after simplification. (a) Sofa before simplification; (b) table before simplification; (c) chair before simplification; (d) sofa after simplification; (e) table after simplification; (f) chair after simplification
Fig. 3. k-tree instance
Fig. 4. Algorithm flow chart
Fig. 5. Building segmentation results under different curvature thresholds. (a) 0.5; (b) 1.0; (c) 1.5
Fig. 6. Point cloud segmentation results after pretreatment with the proposed algorithm. (a) Sofa; (b) table; (c) chair
Fig. 7. Point cloud segmentation results after pretreatment with traditional regional growth algorithm. (a) Sofa; (b) table; (c) chair
|
Table 1. Running time comparison of segmentation results before and after simplification
|
Table 2. Number of points cloud clusters after segmentation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20