
Daoqian Chen, Xiaoping Wu, Yuting Hua. Indoor Visible Light Fingerprint Localization Scheme with Range-Assistance[J]. Laser & Optoelectronics Progress, 2019, 56(6): 060603
- Laser & Optoelectronics Progress
- Vol. 56, Issue 6, 060603 (2019)
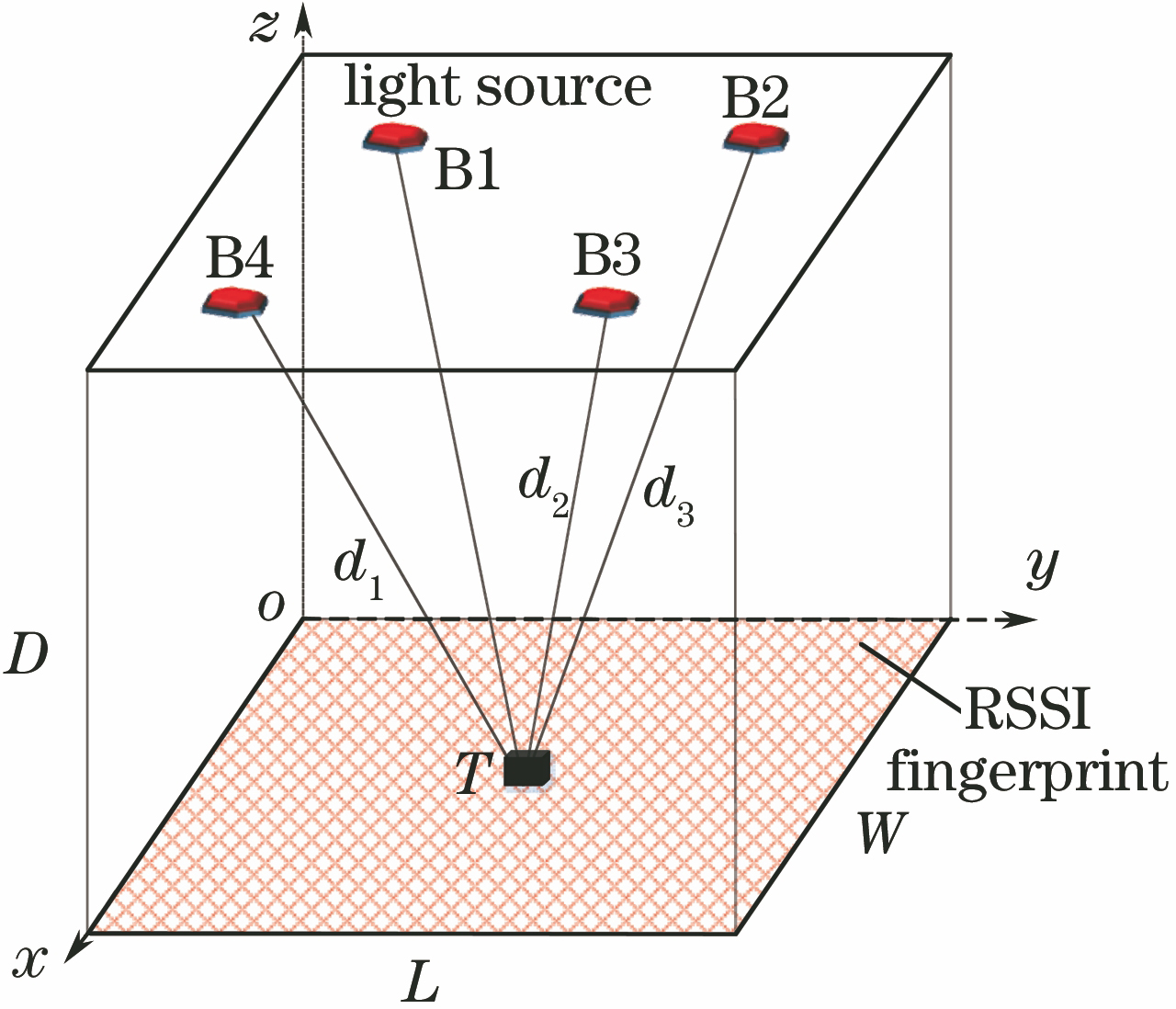
Fig. 1. Visible light indoor positioning model
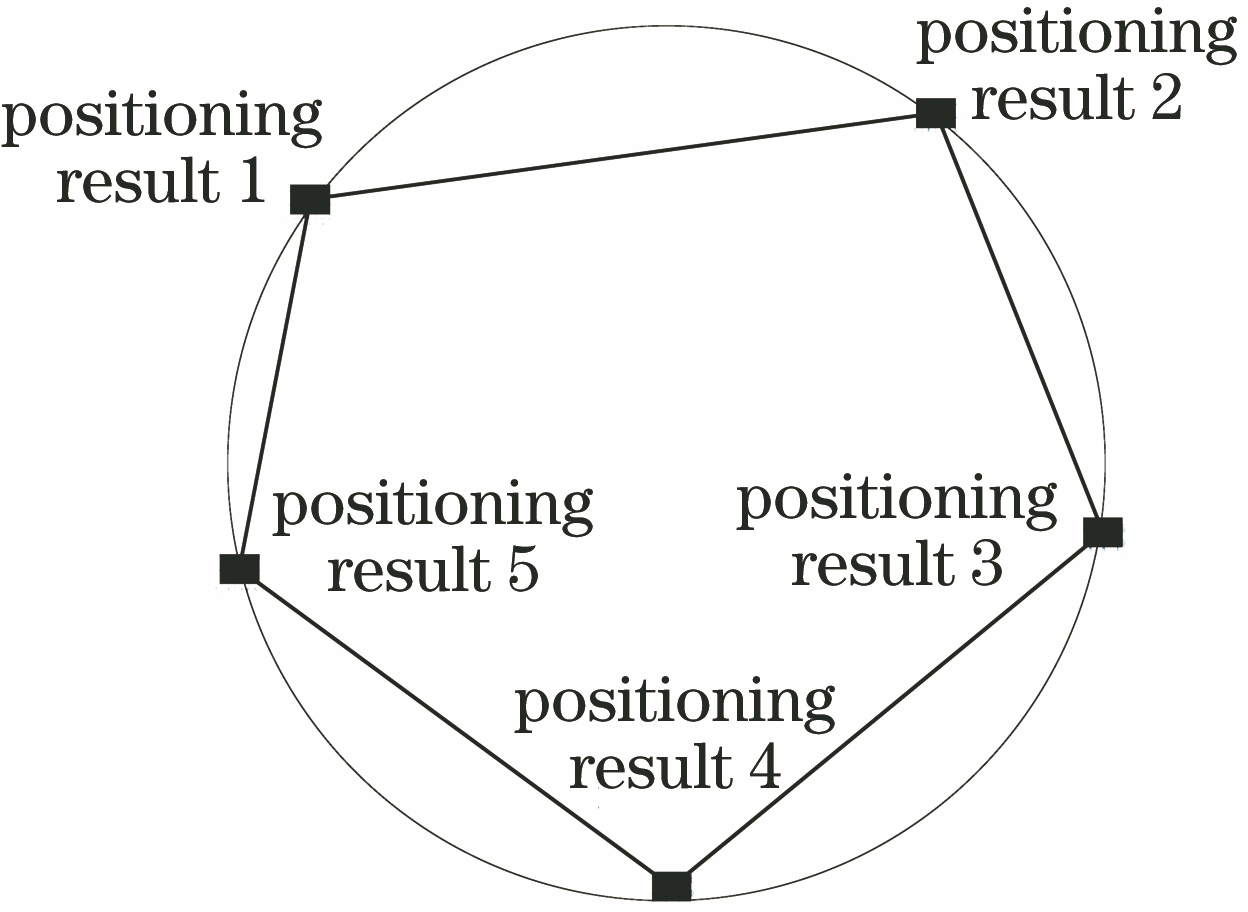
Fig. 2. Schematic of positioning target matching range
Fig. 3. Schematic of plane positioning segmentation
Fig. 4. Schematic of bilinear interpolation
Fig. 5. Schematic of matching positioning
Fig. 6. Experiment results of accuracy degree
Fig. 7. Experimental results for different numbers of light sources
Fig. 8. Running time map of algorithm
Fig. 9. Motion trajectory diagram of positioning target. (a) Actual trajectory; (b) scattered point location; (c) Kalman filtering result
|
Table 1. Experimental parameters
|
Table 2. Experimental results of continuous positioning

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20