
Pan Ou, Kai Zhou, Shuai Wu. Dual-Kinect Spatial Position Calibration Method Based on Sphere and Plane Model[J]. Laser & Optoelectronics Progress, 2018, 55(4): 042802
- Laser & Optoelectronics Progress
- Vol. 55, Issue 4, 042802 (2018)
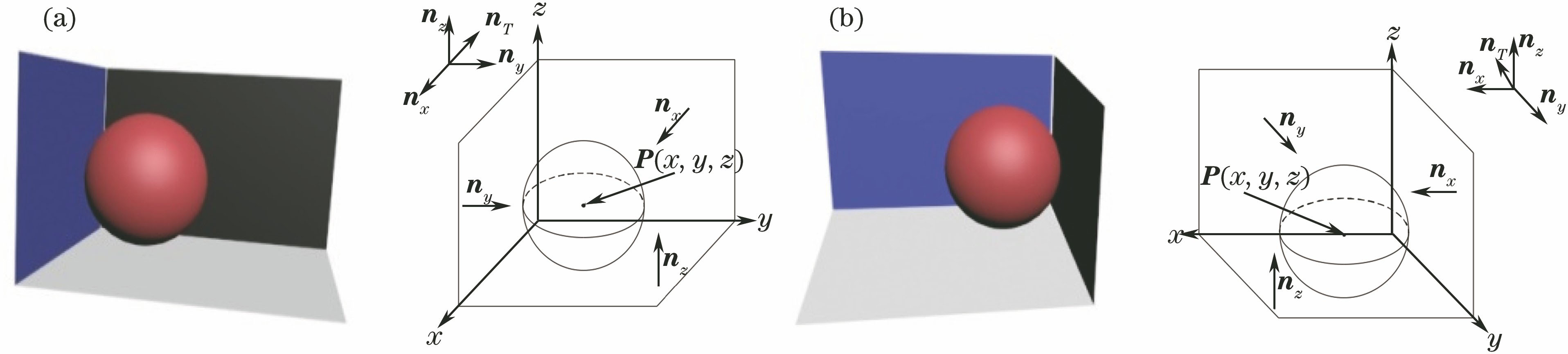
Fig. 1. Diagrams of two-view calibration model and parameters. (a) View 1; (b) view 2
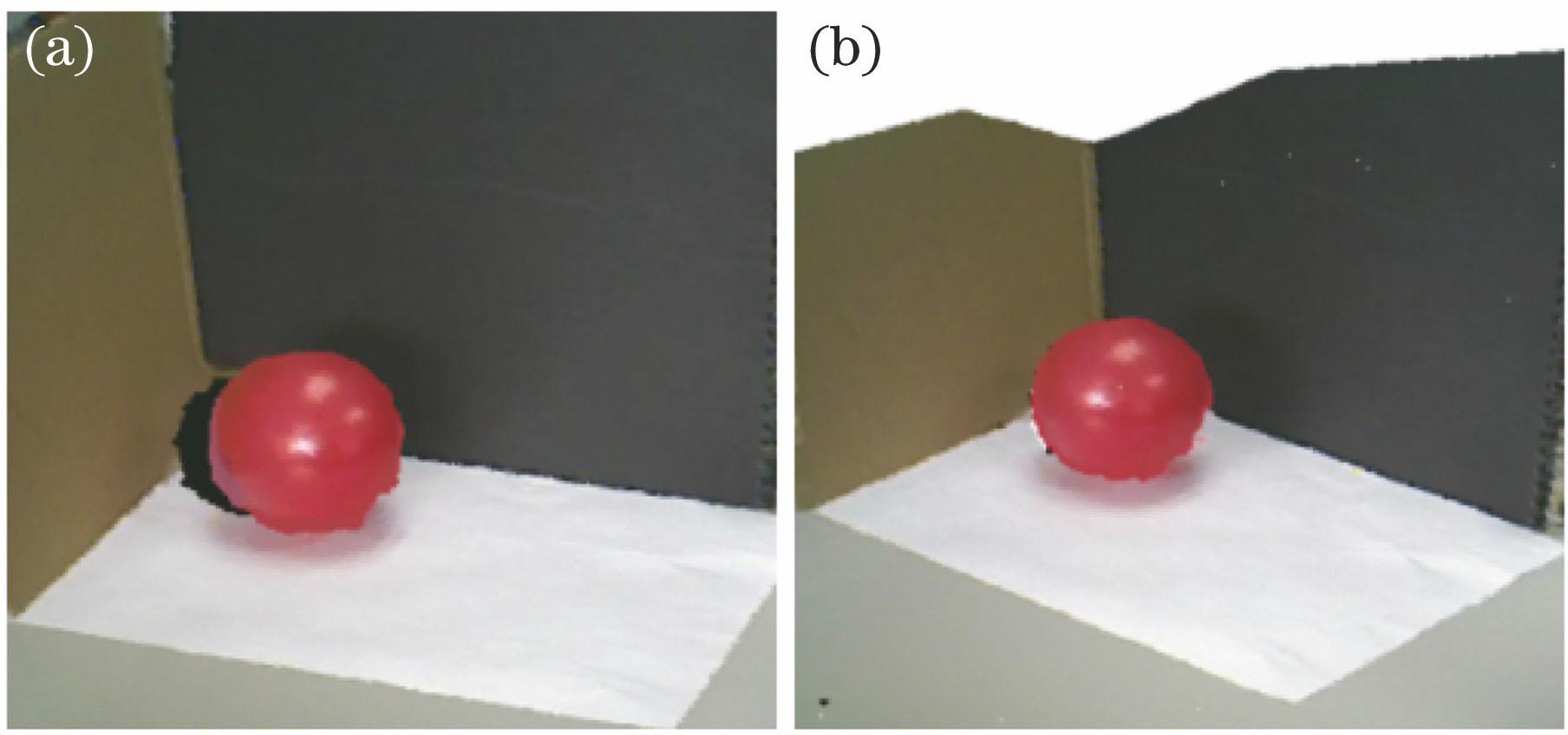
Fig. 2. Point cloud calibration models with different Kinect's views. (a) Point cloud 1; (b) point cloud 2
Fig. 3. Plane segmentation and normal vector extraction results of point cloud
Fig. 4. Extraction results of point cloud normal vector. (a) RANSAC algorithm; (b) improved RANSAC algorithm
Fig. 5. (a) Sphere extraction and (b) sphere fitting result of point cloud
Fig. 6. Registration results of classic ICP algorithm. (a) Un-registrated point cloud; (b) registrated point cloud
Fig. 7. (a) Registration result of adaptive threshold ICP; (b) registration result of proposed method in the paper
|
Table 1. Extraction algorithm of normal vector
|
Table 2. Error between fixed points obtained by plane intersection and sphere center
| ||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Calibration accuracy of different algorithms
|
Table 4. Time consuming of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20