
Wei Cai, Dongjie Yue, Qiang Chen. Point Cloud Data Registration Based on Binary Feature Descriptors[J]. Laser & Optoelectronics Progress, 2022, 59(10): 1015010
- Laser & Optoelectronics Progress
- Vol. 59, Issue 10, 1015010 (2022)
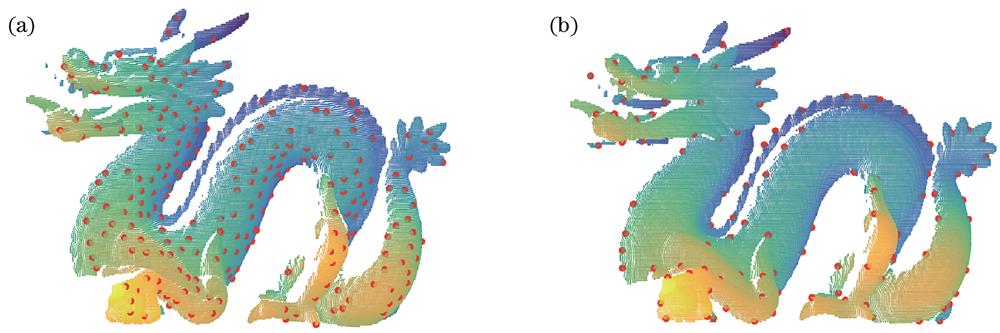
Fig. 1. Keypoints extracted by different algorithms. (a) BSC algorithm; (b) our algorithm
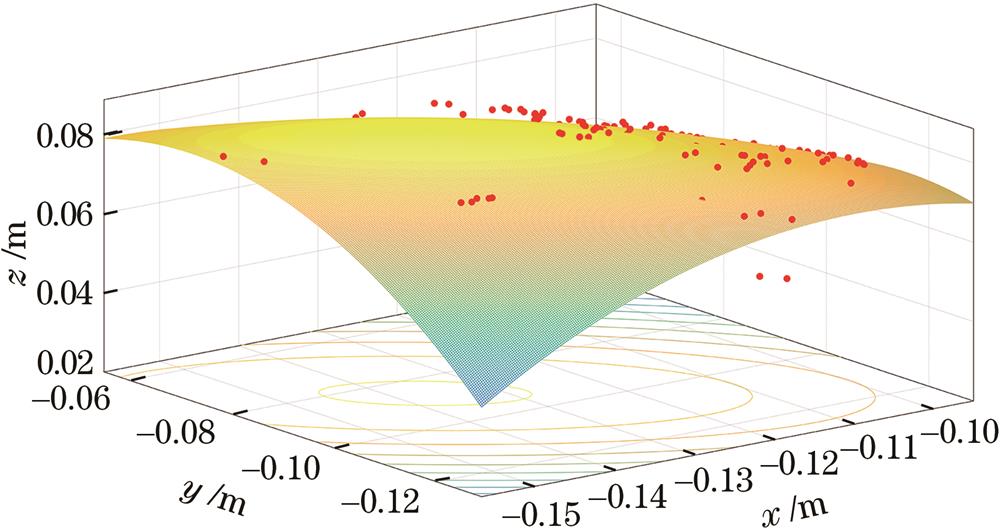
Fig. 2. Local coordinate system of keypoints and their neighborhoods
Fig. 3. Point cloud projection and gridding. (a) xoy plane; (b) xoz plane; (c) yoz plane
Fig. 4. Weighted projection density characteristics
Fig. 5. Weighted projection distance characteristics
Fig. 6. Schematic diagram of binarization of projection distance feature
Fig. 7. Original point cloud data. (a) Source point cloud; (b) target point cloud
Fig. 8. PR curves of different descriptors
Fig. 9. Matching point pairs obtained based on improved geometric consistency method
Fig. 10. Matching point pair processed based on RANSAC algorithm
Fig. 11. Coarse registration results for different algorithms. (a) FPFH; (b) SHOT; (c) BSC; (d) our algorithm
Fig. 12. Fine registration result of our algorithm
| |||||||||||||||||||||||||||
Table 1. Computation time of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20