
Xinchun Li, Hongyan Ma, Sen Lin. Palmprint Recognition Based on Subspace and Texture Feature Fusion[J]. Laser & Optoelectronics Progress, 2019, 56(7): 071007
- Laser & Optoelectronics Progress
- Vol. 56, Issue 7, 071007 (2019)
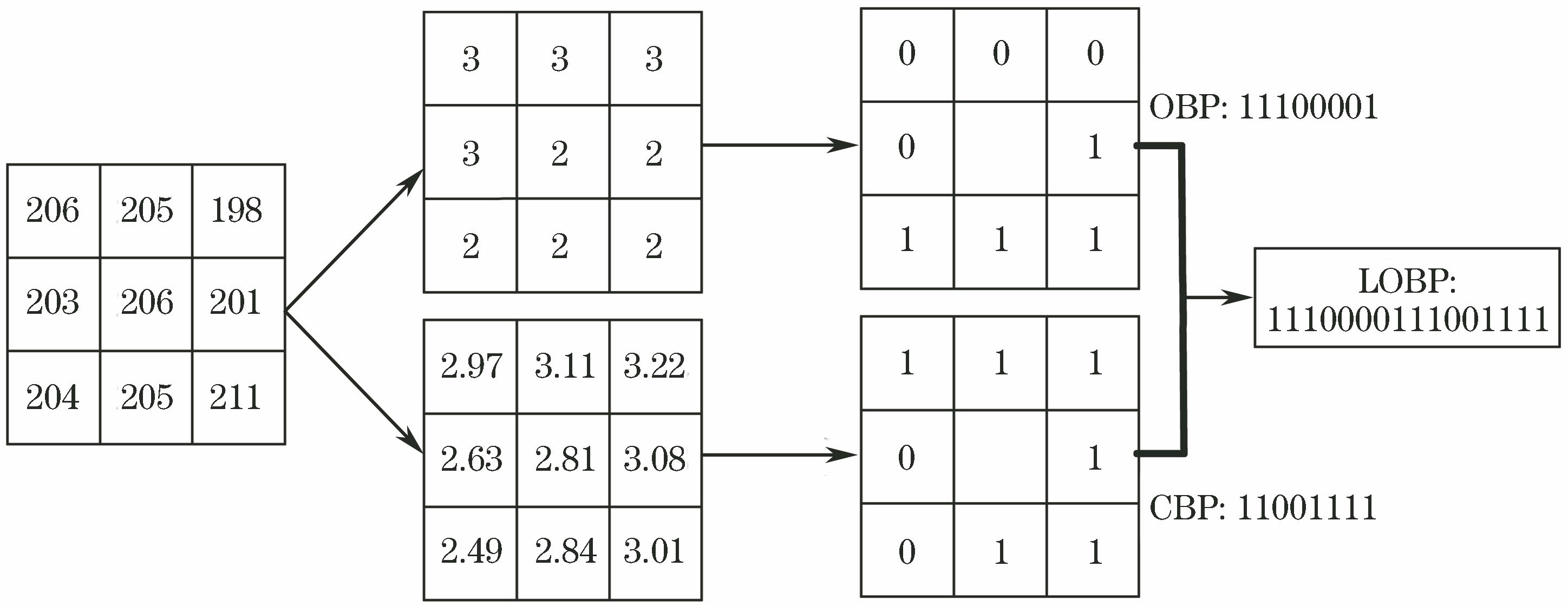
Fig. 1. Coding principle of LOBP
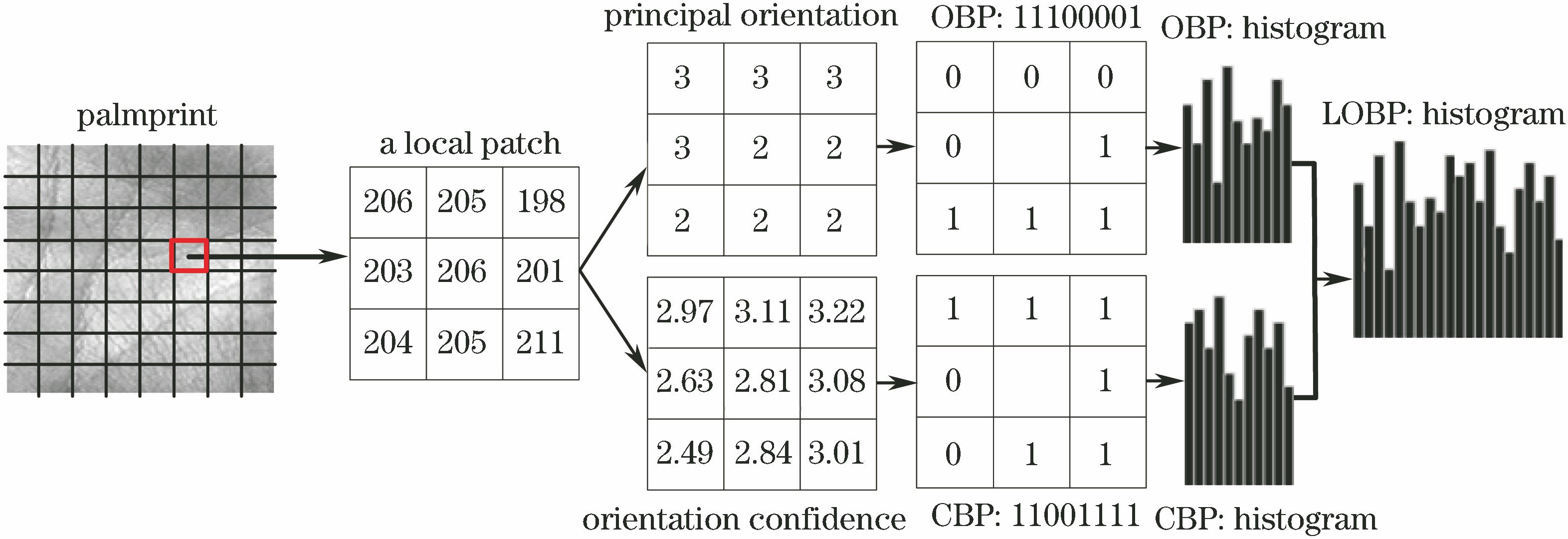
Fig. 2. Flow chart for extracting palmprint texture features by LOBP
Fig. 3. Flow chart of palmprint recognition
Fig. 4. Examples of databases. (a) PolyU database; (b) self-built non-contact database
Fig. 5. Experimental results on PolyU database. (a) Matching results; (b) ROC
Fig. 6. Experimental results on self-built non-contact database. (a) Matching results; (b) ROC
Fig. 7. Comparison of EER between proposed method and latest methods
Fig. 8. Comparison of recognition rate between proposed method and latest methods
|
Table 1. Summary of RLDA algorithm
|
Table 2. EER for single feature and fusion feature recognitions%
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Comparison of EER and recognition time between proposed and other methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20