
Ming Wang, Zhou Sha, Hao Feng, Lipu Du, Dunzhe Qi. φ-OTDR Pattern Recognition Based on LSTM-CNN[J]. Acta Optica Sinica, 2023, 43(5): 0506001
- Acta Optica Sinica
- Vol. 43, Issue 5, 0506001 (2023)
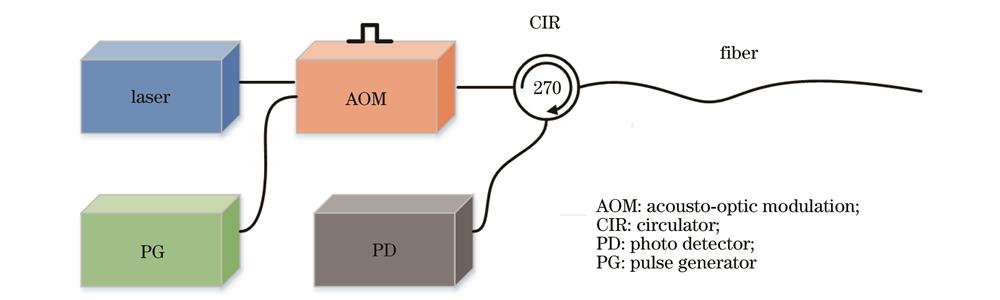
Fig. 1. Structure diagram of φ-OTDR
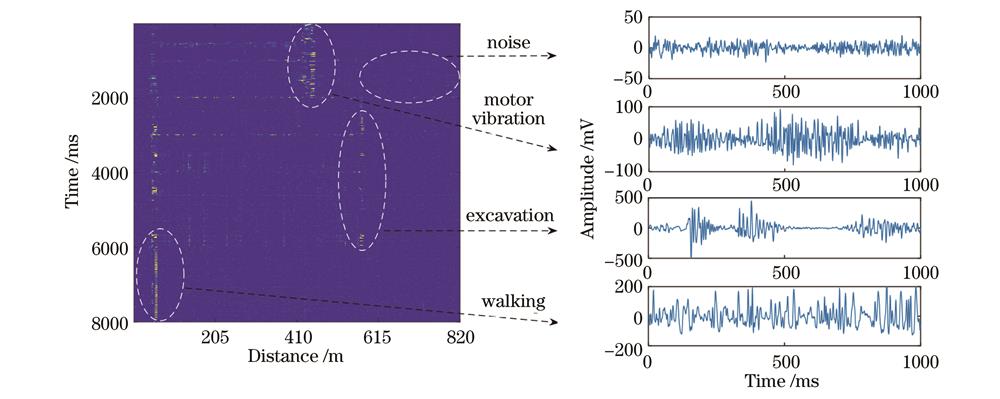
Fig. 2. Comparison of the data presentation form between the time-space map and the time-domain curve
Fig. 3. Operation process of CNN and LSTM. (a) 1D convolution; (b) 2D convolution; (c) LSTM
Fig. 4. Schematic of the internal structure of φ-OTDR integrated system
Fig. 5. Structure diagram of BRNN (LSTM)
Fig. 6. Training situation and test results of LSTM. (a) Curve of loss function with dynamic learning rate; (b) curve of loss function with fixed learning rate; (c) background noise; (d) excavation signal; (e) motor vibration signal; (f) walking signal
Fig. 7. STFT results of target signals. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
Fig. 8. Network structure of LSTM-CNN
Fig. 9. Comparison of overall evaluation indicators. (a) Train accuracy; (b) test accuracy; (c) train loss; (d) test loss
Fig. 10. Recall comparison of test set. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
Fig. 11. Precision comparison of test set. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
Fig. 12. Precision of validation sample. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
Fig. 13. Recall of validation sample. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
Fig. 14. Precision of validation sample of models in Table 3. (a) Background noise; (b) excavation signal; (c) motor vibration signal;(d) walking signal
Fig. 15. Recall of validation sample of models in Table 3. (a) Background noise; (b) excavation signal; (c) motor vibration signal; (d) walking signal
|
Table 1. Important parameters of different neural network structures
| ||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Distribution of identification results and accuracy of the verification samples
|
Table 3. Comparison of LSTM-CNN and common machine-learning models

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20