
Xiaojun Cheng, Xinxin Xiong, Zexin Yang, Rongqi Yang. Cavern Capacity Calculation Using Terrestrial Lidar[J]. Laser & Optoelectronics Progress, 2019, 56(23): 231201
- Laser & Optoelectronics Progress
- Vol. 56, Issue 23, 231201 (2019)
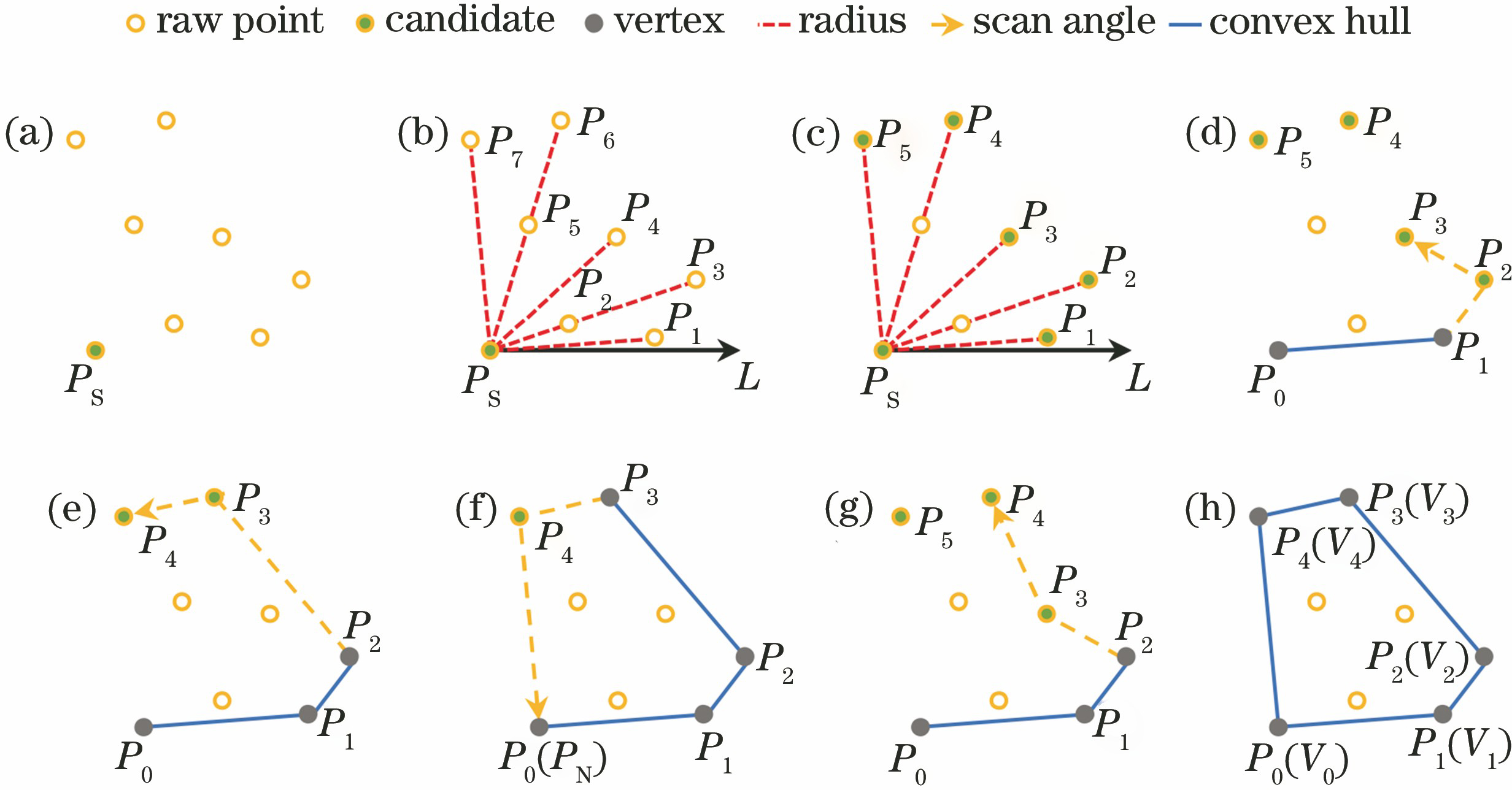
Fig. 1. Schematic of reconstructing convex hull by Graham scan algorithm. (a) Search for pole; (b) polar-angle based ordering; (c) elimination of internal points; (d)(e)(f) three sequential points form anticlockwise direction; (g) three sequential points form clockwise direction; (h) reconstructed convex hull
![Distance from candidate point to edge of polygon. (a) ρ∈(-¥,0]; (b) ρ∈(0,1); (c) ρ∈[1,+¥)](/richHtml/lop/2019/56/23/231201/img_2.jpg)
Fig. 2. Distance from candidate point to edge of polygon. (a) ρ ∈(-¥ ,0]; (b) ρ ∈(0,1); (c) ρ ∈[1,+¥ )
Fig. 3. Effect pictures of experimental data. (a) Size of cross section of cavern; (b) line-shaped point cloud fragment; (c)(d)(e) sizes of line-shaped, turning-shaped, and intersection-shaped point cloud fragments
Fig. 4. Experimental results of contour point extraction. (a) Schematic of hierarchical projection; (b) detailed image of contour points
Fig. 5. Experimental results of section contour point ordering (data are down-sampled for better visualization). (a)(b)(c) Polar-angle based ordering method; (d)(e)(f) our method
|
Table 1. Parameter information of experimental data
|
Table 2. Experimental parameters
| ||||||||||||||||||
Table 3. Comparison between polar-angle based ordering method and our method
| |||||||||||||||||||||||||||||||||||||||||
Table 4. Area table of line-shaped data
| |||||||||||||||||||||||||||||||||||||||||
Table 5. Area table of turning-shaped data
| |||||||||||||||||||||||||||||||||||||||||
Table 6. Area table of intersection-shaped data
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 7. Capacity table of three experimental data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20