
Jian Liu, Di Bai. 3D Point Cloud Registration Algorithm Based on Feature Matching[J]. Acta Optica Sinica, 2018, 38(12): 1215005
- Acta Optica Sinica
- Vol. 38, Issue 12, 1215005 (2018)
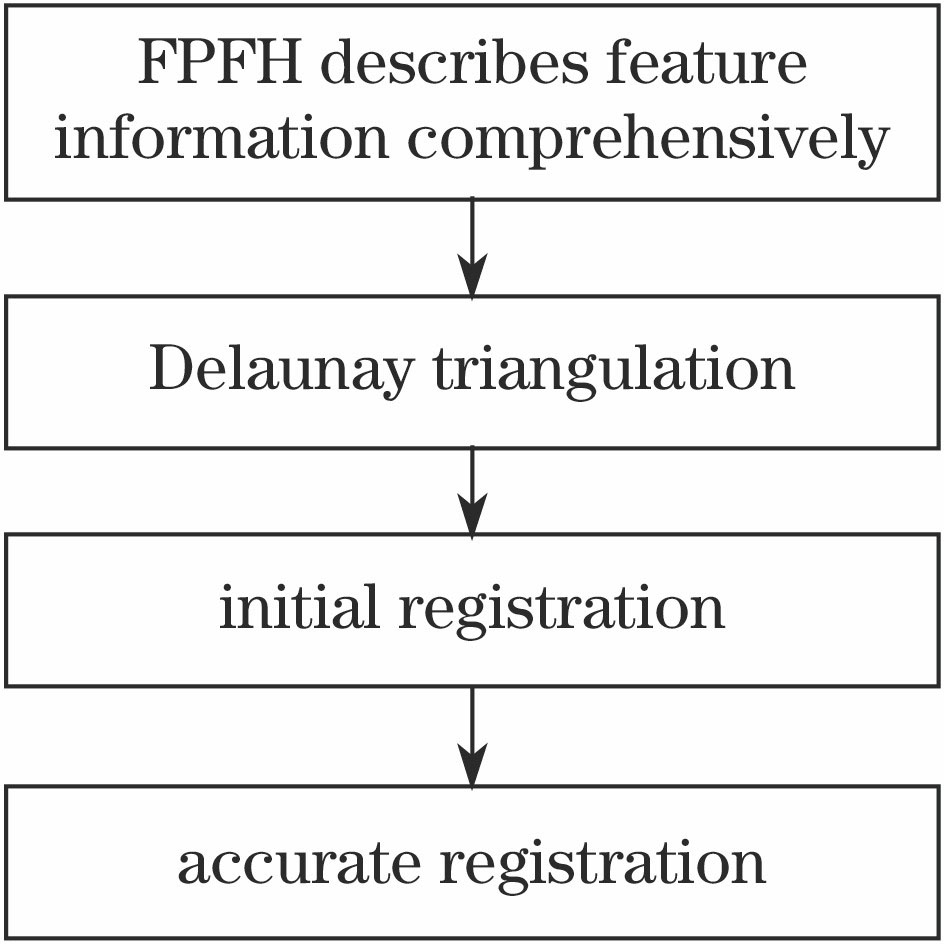
Fig. 1. Flowchart of point cloud registration
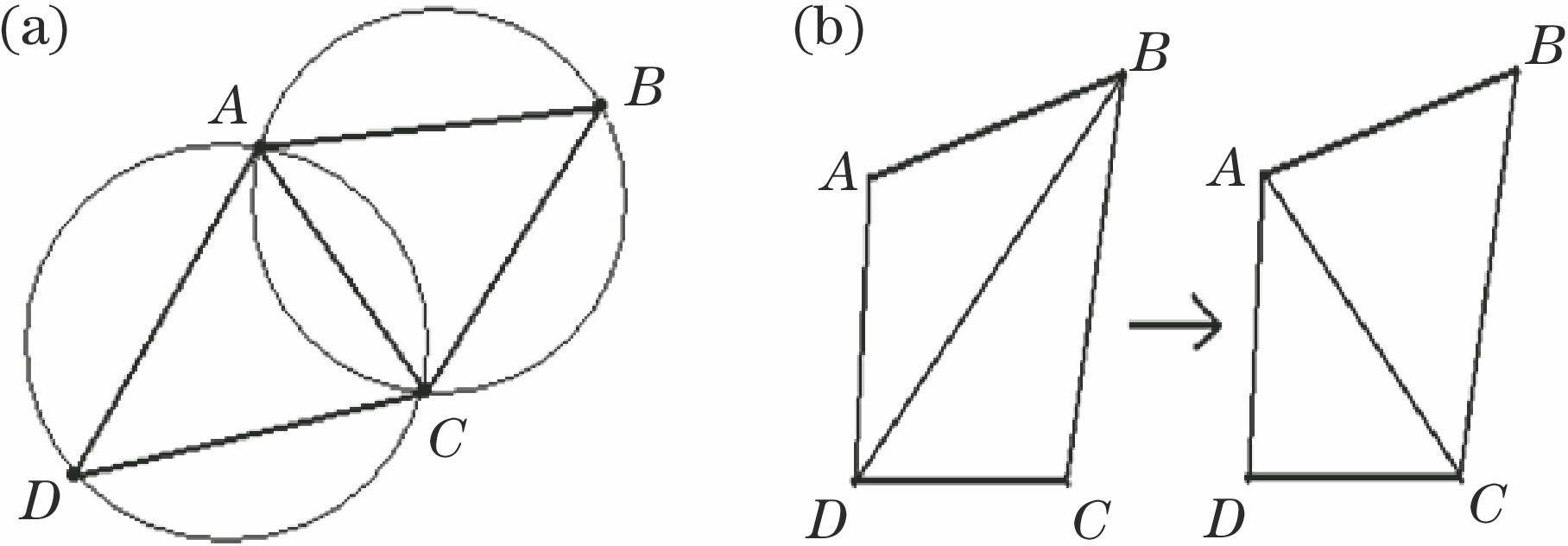
Fig. 2. Characteristic diagram. (a) Empty circle characteristics; (b) maximized minimum angle characteristics
Fig. 3. Generation process diagram. (a) Insert a new node P; (b) empty circumscribed circle detection; (c) delete the edge AB; (d) form triangles
Fig. 4. Delaunay triangulation generation chart
Fig. 5. Registration charts of a seat. (a) Original point cloud; (b) point cloud of seat; (c) traditional algorithm registration; (d) proposed algorithm registration
Fig. 6. Contrast diagrams of registration time. (a) Total registration time; (b) initial registration time
Fig. 7. Registration charts of car model. (a) Point cloud data; (b) 3D reconstruction diagram; (c) side initial registration chart; (d) side accurate registration chart; (e) top initial registration chart; (f) top accurate registration chart
Fig. 8. Threshold influence curves. (a) Relation curves between average error distance and threshold; (b) relation curves between accurate registration time and threshold
|
Table 1. Average registration times
|
Table 2. Comparison of average error distance and total registration time of multiple registration experiments
| ||||||||||||||||||
Table 3. Experimental parameters
|
Table 4. Point cloud conversion results of different algorithms
|
Table 5. [in Chinese]
|
Table 6. Experimental results of different algorithms

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20