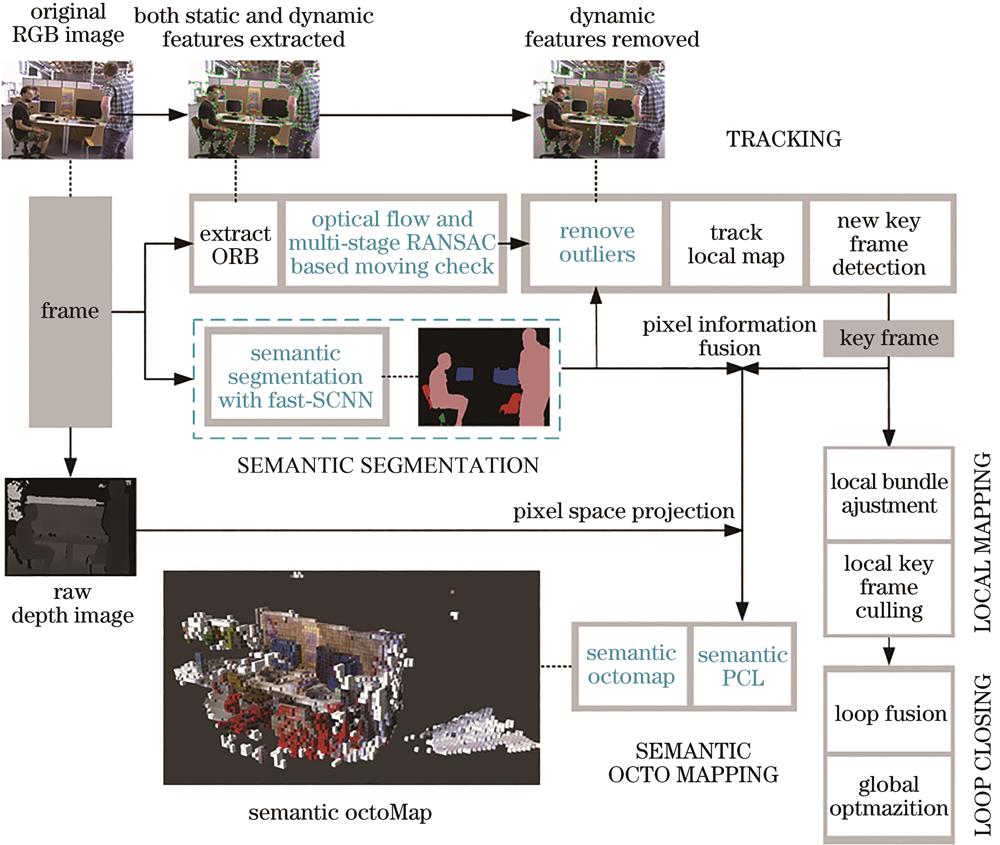
Fig. 1. Structure of proposed vSLAM system
Fig. 2. Network structure of FAST-SCNN
[10] Fig. 3. Result of semantic segmentation. (a) Original drawing; (b) segmented output
Fig. 4. Outliers removing. (a) All feature points; (b) effect after removing moving points
Fig. 5. Diagram of octree map
Fig. 6. Semantic octree map building process
Fig. 7. Dining Rooms image sequence and its semantic segmentation results
Fig. 8. Point cloud. (a) Original point cloud; (b) filtered point cloud
Fig. 9. Semantic point cloud and semantic octree map. (a) Semantic point cloud; (b) semantic octree map
Fig. 10. Comparison of ATE. (a) ORB-SLAM2; (b) proposed system
Fig. 11. Comparison of relative translation error. (a) ORB-SLAM2; (b) proposed system
Fig. 12. Semantic octree map building effect. (a) Original frame sequence; (b) semantic octree map
Fig. 13. Feature points extraction of proposed system in two scenes
Fig. 14. Semantic segmentation results of proposed system in two scenes
Fig. 15. Moving point removing effect of proposed system in two scenes
Fig. 16. Map building effect of proposed system
Algorithm Multi-stage RANSAC Algorithm |
|---|
Input: Previous Frame, F1; KeyPoints of F1, K; Current Frame, F2;The minimum number of points required, m | Output: The outliers, O; The inliers, I | 1: assign K to I | 2: for the current stage number i is less than n | 3: compute the maximum number required for iterations, N | 4: select randomly m points from I | 5: while the number of iterations is less than N | 6: solve for F | 7: determine the portion of inliers among K using F | 8: if the portion of inliers is larger than τi | 9: leave the loop | 10: end if | 11: end while | 12: assign new inliers to I | 13: end for |
|
Table 1. Multi-stage RANSAC algorithm
| τ | Ins. | Outs. | Time /ms |
|---|
| 0.1 | 168 | 6 | 8.22814 | | 0.2 | 228 | 12 | 1.02447 | | 0.3 | 260 | 13 | 0.60222 |
|
Table 2. Test results of RANSAC algorithm
| τ1 | τ2 | Ins.1 | Ins.2 | Outs. | Time /ms |
|---|
| 1 | 0.1 | 294 | 159 | 5 | 4.99953 | | 1 | 0.2 | 294 | 210 | 4 | 0.83729 | | 1 | 0.3 | 294 | 238 | 11 | 0.48140 | | 2 | 0.1 | 327 | 159 | 7 | 9.83135 | | 2 | 0.2 | 327 | 211 | 9 | 1.63077 | | 2 | 0.3 | 327 | 238 | 11 | 0.69094 |
|
Table 3. Test results of Multi-stage RANSAC algorithm
| Dynamic Points Removing Algorithm |
|---|
| Input: Dynamic Points, O; Semantic mask of most likely moving objects, M; KeyPoints, K | | Output: The set of inliers, I | | 1: if M not empty then | | 2: for point o, m in O, M do | | 3: if o = m then | | 4: remove M from K | | 5: leave the loop | | 6: end if | | 7: end for | | 8: end if |
|
Table 4. Moving point removing algorithm
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.825981 | 0.449478 | | 0.019991 | 0.010374 | | 97.58 | 97.69 | | WH | 0.502363 | 0.299615 | | 0.025955 | 0.012036 | | 94.83 | 95.98 | | WR | 1.212279 | 0.676205 | | 0.062167 | 0.041967 | | 94.87 | 93.79 | | WS | 0.585281 | 0.423743 | | 0.009044 | 0.004097 | | 98.45 | 99.03 | | SX | 0.013602 | 0.006688 | | 0.012649 | 0.006140 | | 7.01 | 8.19 | | SH | 0.040732 | 0.023205 | | 0.017660 | 0.008521 | | 56.64 | 63.28 | | SR | 0.030898 | 0.018059 | | 0.021174 | 0.011048 | | 31.47 | 38.82 | | SS | 0.012007 | 0.005570 | | 0.007237 | 0.003720 | | 39.73 | 33.21 |
|
Table 5. Typical value of translation
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /deg | S.D /deg | | RMSE /deg | S.D /deg | | RMSE /% | S.D /% |
|---|
| WX | 14.812930 | 8.086117 | | 0.618651 | 0.376314 | | 95.82 | 95.35 | | WH | 13.379170 | 7.277847 | | 0.749063 | 0.354548 | | 94.40 | 95.13 | | WR | 22.021472 | 12.858064 | | 1.201734 | 0.787774 | | 94.54 | 93.87 | | WS | 10.334787 | 7.523754 | | 0.256180 | 0.110816 | | 97.52 | 98.53 | | SX | 0.578052 | 0.299133 | | 0.503881 | 0.274636 | | 12.83 | 8.19 | | SH | 1.030726 | 0.456638 | | 0.652451 | 0.330930 | | 36.70 | 27.53 | | SR | 0.882169 | 0.434188 | | 0.748790 | 0.362180 | | 15.12 | 16.58 | | SS | 0.336292 | 0.144834 | | 0.259707 | 0.116066 | | 22.77 | 19.86 |
|
Table 6. Typical value of rotation
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.565505 | 0.200691 | | 0.014932 | 0.007969 | | 97.36 | 96.03 | | WH | 0.327989 | 0.177225 | | 0.025357 | 0.013169 | | 92.27 | 92.57 | | WR | 0.817879 | 0.430206 | | 0.047672 | 0.033180 | | 94.17 | 92.29 | | WS | 0.409268 | 0.175114 | | 0.006957 | 0.003244 | | 98.30 | 98.15 | | SX | 0.009275 | 0.004796 | | 0.010674 | 0.004922 | | -15.08 | -2.63 | | SH | 0.027882 | 0.013692 | | 0.014091 | 0.006767 | | 49.46 | 50.58 | | SR | 0.021513 | 0.014181 | | 0.016052 | 0.009607 | | 25.38 | 32.25 | | SS | 0.007698 | 0.003655 | | 0.005568 | 0.003047 | | 27.67 | 16.63 |
|
Table 7. Typical value of ATE
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.030283 | 0.019977 | | 0.019991 | 0.010374 | | 33.99 | 48.07 | | WH | 0.031893 | 0.016458 | | 0.025955 | 0.012036 | | 18.62 | 26.87 | | WR | 0.152189 | 0.116961 | | 0.062167 | 0.041967 | | 59.15 | 64.12 | | WS | 0.009347 | 0.004358 | | 0.009044 | 0.004097 | | 3.24 | 5.99 | | SX | 0.012692 | 0.006664 | | 0.012649 | 0.006140 | | 0.34 | 7.86 | | SH | 0.017403 | 0.007808 | | 0.017660 | 0.008221 | | -1.48 | -5.29 | | SR | 0.025757 | 0.014738 | | 0.021174 | 0.011048 | | 17.79 | 25.04 | | SS | 0.007327 | 0.003564 | | 0.007237 | 0.003520 | | 1.29 | 1.23 |
|
Table 8. Typical value of translation
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /deg | S.D /deg | | RMSE /deg | S.D /deg | | RMSE /% | S.D /% |
|---|
| WX | 0.766283 | 0.529380 | | 0.618651 | 0.376314 | | 19.27 | 28.91 | | WH | 0.846296 | 0.422084 | | 0.749063 | 0.354548 | | 11.49 | 16.00 | | WR | 3.043619 | 2.335232 | | 1.201734 | 0.787774 | | 60.52 | 66.27 | | WS | 0.255013 | 0.106953 | | 0.256180 | 0.110816 | | -0.46 | -3.61 | | SX | 0.495392 | 0.270148 | | 0.493881 | 0.274636 | | 0.31 | -1.66 | | SH | 0.630755 | 0.300657 | | 0.628451 | 0.290930 | | 0.37 | 3.24 | | SR | 0.843054 | 0.468068 | | 0.748790 | 0.362180 | | 11.18 | 22.62 | | SS | 0.262147 | 0.117104 | | 0.259707 | 0.116066 | | 0.93 | 0.89 |
|
Table 9. Typical value of rotation
| Seq. | ORB-SLAM2 | | Proposed system | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.022180 | 0.014402 | | 0.014932 | 0.007969 | | 32.68 | 44.67 | | WH | 0.032083 | 0.017715 | | 0.025357 | 0.013169 | | 20.96 | 25.66 | | WR | 0.433820 | 0.228252 | | 0.047672 | 0.033180 | | 89.01 | 85.46 | | WS | 0.007709 | 0.003275 | | 0.006957 | 0.003244 | | 9.75 | 0.95 | | SX | 0.010339 | 0.005377 | | 0.010674 | 0.004922 | | -3.24 | 8.46 | | SH | 0.014816 | 0.006672 | | 0.014091 | 0.006767 | | 4.89 | -1.42 | | SR | 0.020242 | 0.012680 | | 0.016052 | 0.009607 | | 20.70 | 24.24 | | SS | 0.006273 | 0.003085 | | 0.005568 | 0.003047 | | 11.24 | 1.23 |
|
Table 10. Typical value of ATE
| Seq. | DS-SLAM | | Multi | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.030283 | 0.019977 | | 0.024652 | 0.013576 | | 18.59 | 32.04 | | WH | 0.031893 | 0.016458 | | 0.029321 | 0.016007 | | 8.06 | 2.74 | | WR | 0.152189 | 0.116961 | | 0.138137 | 0.110548 | | 9.23 | 5.48 | | WS | 0.009347 | 0.004358 | | 0.009599 | 0.004705 | | -2.70 | -7.96 | | SX | 0.012692 | 0.006664 | | 0.012615 | 0.006442 | | 0.61 | 3.33 | | SH | 0.017403 | 0.007808 | | 0.017283 | 0.007227 | | 0.69 | 7.44 | | SR | 0.025757 | 0.014738 | | 0.021212 | 0.011222 | | 1.76 | 24.1 | | SS | 0.007327 | 0.003564 | | 0.007315 | 0.003871 | | 0.16 | -0.03 |
|
Table 11. Typical value of translation
| Seq. | DS-SLAM | | Multi | | Improvement |
|---|
| RMSE /deg | S.D /deg | | RMSE /deg | S.D /deg | | RMSE /% | S.D /% |
|---|
| WX | 0.766283 | 0.529380 | | 0.683158 | 0.440730 | | 10.85 | 16.75 | | WH | 0.846296 | 0.422084 | | 0.824658 | 0.447438 | | 2.56 | -6.01 | | WR | 3.043619 | 2.335232 | | 2.797477 | 2.189081 | | 8.09 | 6.26 | | WS | 0.255013 | 0.106953 | | 0.261905 | 0.122951 | | -2.70 | -14.96 | | SX | 0.495392 | 0.270148 | | 0.488689 | 0.259726 | | 0.14 | 3.86 | | SH | 0.630755 | 0.300657 | | 0.618015 | 0.289567 | | 0.20 | 3.69 | | SR | 0.843054 | 0.468068 | | 0.681521 | 0.333695 | | 19.16 | 28.71 | | SS | 0.262147 | 0.117104 | | 0.265180 | 0.110150 | | -1.16 | 5.94 |
|
Table 12. Typical value of rotation
| Seq. | DS-SLAM | | Multi | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.022180 | 0.014402 | | 0.019148 | 0.010682 | | 13.67 | 25.83 | | WH | 0.032083 | 0.017715 | | 0.028845 | 0.015730 | | 10.09 | 11.21 | | WR | 0.433820 | 0.228252 | | 0.407781 | 0.205247 | | 6.00 | 10.08 | | WS | 0.007709 | 0.003275 | | 0.007302 | 0.003459 | | 5.28 | -5.62 | | SX | 0.010339 | 0.005377 | | 0.009962 | 0.005129 | | 3.65 | 4.61 | | SH | 0.014816 | 0.006672 | | 0.014589 | 0.006602 | | 1.53 | 1.10 | | SR | 0.020242 | 0.012680 | | 0.016531 | 0.010268 | | 18.33 | 19.02 | | SS | 0.006273 | 0.003085 | | 0.006142 | 0.003216 | | 2.09 | -4.25 |
|
Table 13. Typical value of ATE
| Seq. | DS-SLAM | | Semantic | | Improvement |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.030283 | 0.019977 | | 0.020390 | 0.010275 | | 32.67 | 48.57 | | WH | 0.031893 | 0.016458 | | 0.027500 | 0.014119 | | 13.77 | 14.21 | | WR | 0.152189 | 0.116961 | | 0.072958 | 0.051138 | | 52.06 | 56.28 | | WS | 0.009347 | 0.004358 | | 0.009172 | 0.004383 | | 1.87 | -0.57 | | SX | 0.012692 | 0.006664 | | 0.012570 | 0.006306 | | 0.96 | 5.37 | | SH | 0.017403 | 0.007808 | | 0.017659 | 0.007570 | | -1.47 | 3.05 | | SR | 0.025757 | 0.014738 | | 0.020002 | 0.010545 | | 22.34 | 28.45 | | SS | 0.007327 | 0.003564 | | 0.007121 | 0.003518 | | 2.81 | 1.29 |
|
Table 14. Typical value of translation
| Seq. | DS-SLAM | | Semantic | | Improvements |
|---|
| RMSE /deg | S.D /deg | | RMSE /deg | S.D /deg | | RMSE /% | S.D /% |
|---|
| WX | 0.766283 | 0.529380 | | 0.614950 | 0.379957 | | 19.75 | 28.23 | | WH | 0.846296 | 0.422084 | | 0.799037 | 0.402792 | | 5.58 | 4.57 | | WR | 3.043619 | 2.335232 | | 1.471557 | 1.021622 | | 51.65 | 56.25 | | WS | 0.255013 | 0.106953 | | 0.260383 | 0.114594 | | -2.11 | -7.14 | | SX | 0.495392 | 0.270148 | | 0.486103 | 0.263159 | | 1.88 | 2.59 | | SH | 0.630755 | 0.300657 | | 0.649584 | 0.314669 | | -2.99 | -4.66 | | SR | 0.843054 | 0.468068 | | 0.667244 | 0.323382 | | 20.85 | 30.91 | | SS | 0.262147 | 0.117104 | | 0.258282 | 0.113205 | | 1.47 | 3.33 |
|
Table 15. Typical value of rotation
| Seq. | DS-SLAM | | Semantic | | Improvements |
|---|
| RMSE /m | S.D /m | | RMSE /m | S.D /m | | RMSE /% | S.D /% |
|---|
| WX | 0.022180 | 0.014402 | | 0.015859 | 0.008289 | | 28.50 | 42.45 | | WH | 0.032083 | 0.017715 | | 0.026138 | 0.013565 | | 18.53 | 23.43 | | WR | 0.433820 | 0.228252 | | 0.057395 | 0.041521 | | 86.77 | 81.81 | | WS | 0.007709 | 0.003275 | | 0.007095 | 0.003276 | | 7.96 | -0.03 | | SX | 0.010339 | 0.005377 | | 0.010258 | 0.004892 | | 0.78 | 9.02 | | SH | 0.014816 | 0.006672 | | 0.014299 | 0.006334 | | 3.49 | 5.07 | | SR | 0.020242 | 0.012680 | | 0.016159 | 0.009816 | | 20.17 | 22.59 | | SS | 0.006273 | 0.003085 | | 0.005903 | 0.002946 | | 5.90 | 4.51 |
|
Table 16. Typical value of ATE
| vSLAM | ORB extract | Moving check | Segmentation |
|---|
| Proposed | 0.008118 | 0.012913 | 0.020810 | | DS-SLAM | 0.008118 | 0.017299 | 0.027627 |
|
Table 17. Time comparison of feature point extraction, motion consistency judgment, and semantic segmentation

![Network structure of FAST-SCNN[10]](/richHtml/lop/2022/59/18/1811003/img_02.jpg)
