
Yujing Qiao, Baoming Jia, Jingang Jiang, Jingyi Wang. Networking method of multi-view stereo-vision measurement network[J]. Infrared and Laser Engineering, 2020, 49(7): 20190492
- Infrared and Laser Engineering
- Vol. 49, Issue 7, 20190492 (2020)
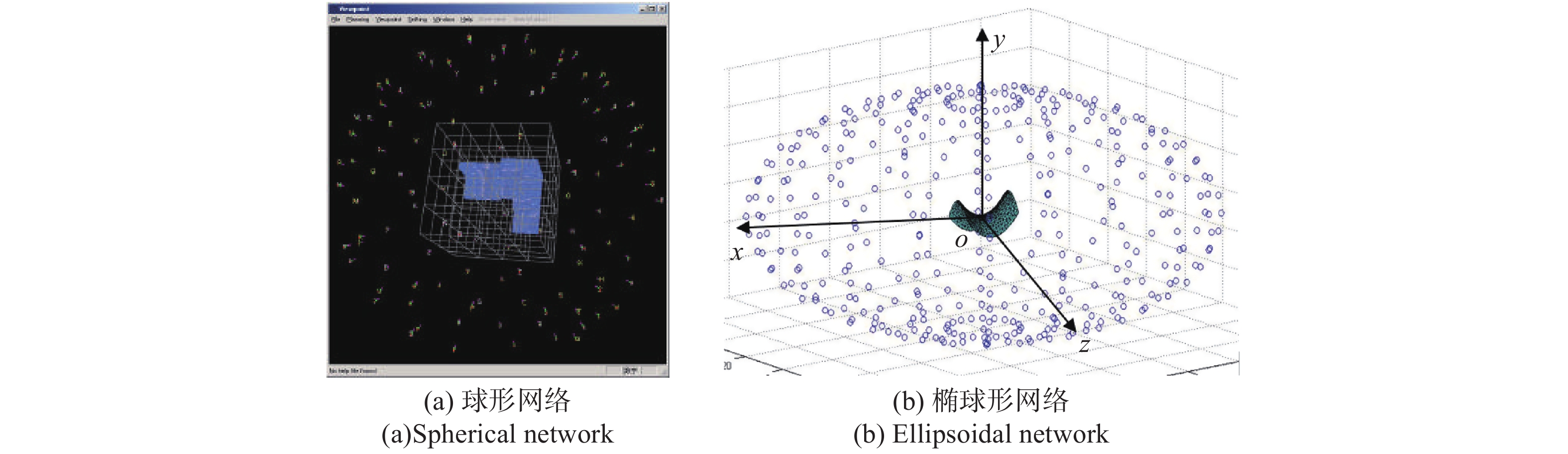
Fig. 1. Visual measurement network model
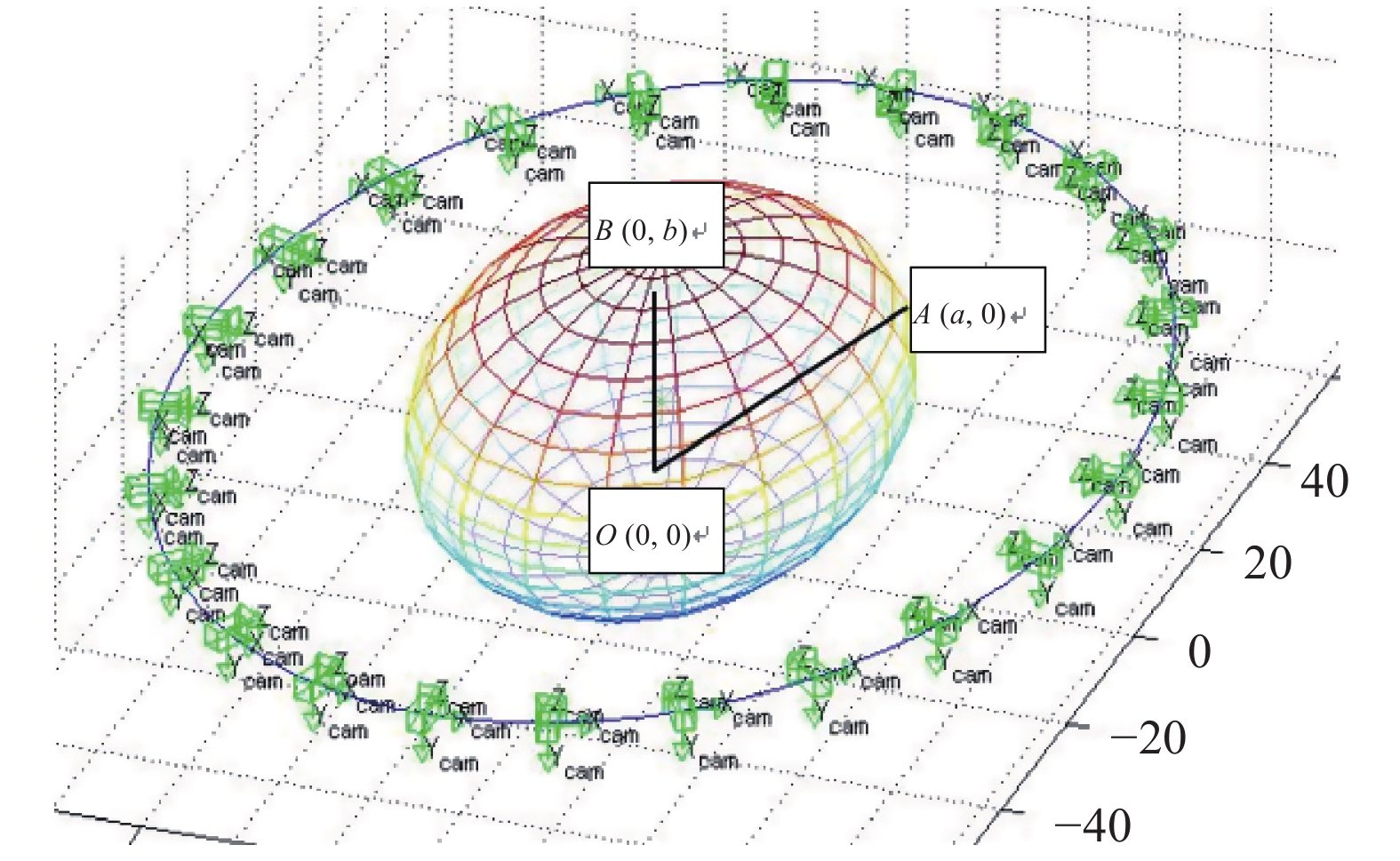
Fig. 2. Camera position layout diagram
Fig. 3. Schematic diagram of the normal vector of the triangle
Fig. 4. Viewpoint simulation result distribution diagram
Fig. 5. Experimental platform and real shot
Fig. 6. Shade point cloud and ellipsoid initial measurement network
Fig. 7. Image of three viewpoint positions
Fig. 8. Measurement network for aperture f /1.4,f /2.0,f /2.8,f /4.0
Fig. 9. Coverage comparison chart
Fig. 10. Three-dimensional reconstruction of the lampshade
|
Table 1. Constraint formula and description
|
Table 2. Camera
${c_1}$ ![]()
![]()
${c_2}$ ![]()
![]()
${c_3}$ ![]()
![]()
${c_4}$ ![]()
![]()
|
Table 3. Camera number comparison
|
Table 4. Comparative analysis of precision data

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20