
Wei Wang, Lü Bin, Yirui Yang, Xinyu Hu, Yuchun Huang, Zhongtao Ye, Minghui Wang. Vehicle Location and Reidentification Using Multisource Point Clouds and Images[J]. Laser & Optoelectronics Progress, 2023, 60(10): 1028005
- Laser & Optoelectronics Progress
- Vol. 60, Issue 10, 1028005 (2023)
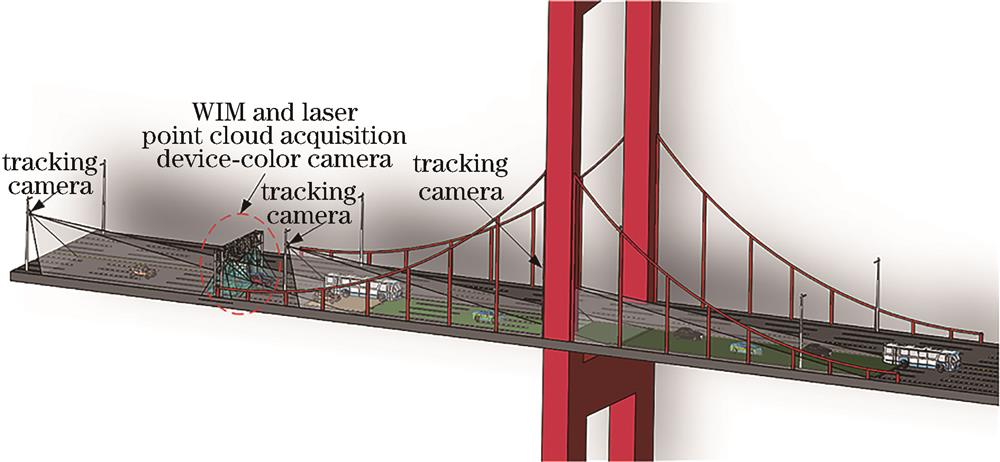
Fig. 1. Monitoring system for bridge's moving load based on WIM and multi-cameras

Fig. 2. Generation and application of vehicle RGB-D data. (a) Registration of 3D point cloud and RGB camera; (b) center of gravity estimation and virtual scene generation by using RGB-D data
Fig. 3. Point cloud and image acquisition devices over the WIM
Fig. 4. Calibration of point cloud and image acquisition devices
Fig. 5. Interpolation of point cloud
Fig. 6. Vehicle mockup
Fig. 7. Point cloud acquisition device
Fig. 8. Original partial point cloud. (a) Point cloud from top side; (b) point cloud from right side; (c) point cloud from left side; (d) point cloud from front side
Fig. 9. Full 3D point cloud of the model
Fig. 10. Influence of different number of sampling points on variation of Euclidean distance of normal vector
Fig. 11. Color image and point cloud grayscale image of vehicle model
Fig. 12. Colored cloud point grid of vehicle mockup
Fig. 13. Virtual scene and real image of vehicle
Fig. 14. Deviation diagram along Y coordinate
| |||||||||||||||
Table 1. Time consuming for point cloud registration of the proposed algorithm and SAC-IA
| |||||||||||||||||||||||||||||||||||||||
Table 2. Vehicle center in world coordinate at different scenes

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20