Soft robots are a kind of intelligent systems, which can achieve predetermined functions independently through its own deformation or under environmental stimuli. Unlike traditional robots based on rigid materials, soft robots exhibit distinct advantages such as non-invasive, highly integrated and holistic functionalized properties. Actuators based on soft materials have been widely investigated and introduced into robotic systems. However, at present, most soft robots can only realize simple and basic deformation, such as bending, rotating, vibration, and reconfiguration performances. In this regard, robots that possess multi-functionality and permit flexible manipulation are highly desired, especially for their potential applications in artificial intelligence. To bridge this gap, novel materials and effective fabrication technologies are thus becoming increasingly important.
As a well-known flexible 2D material, graphene has been successfully prepared by mechanical exfoliation in 2004. Afterwards, enormous works emerge extensively. Considerable studies have been focused on the controllable preparation of graphene and graphene-related materials, morphologies of which can be well tuned from micro to macro structures, such as quantum dots, nanosheets, nanoribbons, nanomeshes in microscopic and various macro-structures (fiber, ribbon, film, paper, foam)[1]. Graphene has many unique properties, i.e. excellent electrical/thermal conductivity, high optical transparency, and high mechanical strength. All of these physical properties can be further adjusted through doping, hybridizing and mixing with other chemical components, making graphene a superior material for robot design. For example, taking advantage of the good conductivity of graphene, electric-driven actuators with large deflection (> 1.0 cm–1) under low input voltage (≤ 5 V) were achieved[2]. Utilizing the good photothermal effect of graphene, Ying et al. successfully designed an optical-driven rolling and folding system[3]. Graphene oxide (GO), as one of the important graphene derivatives, features unique water adsorption property. Large amounts of oxygen-containing functional groups within GO layers make it possible to develop humidity-driven soft robots[4]. Actuations triggered by other stimulation signals, such as magnetism and pH, can be realized by hybridizing/mixing graphene with corresponding functional materials. Nowadays, research on the topic of soft robots based on graphene is still in its infancy. Graphene soft robots for commercialization and functionalized usage are still challenging.
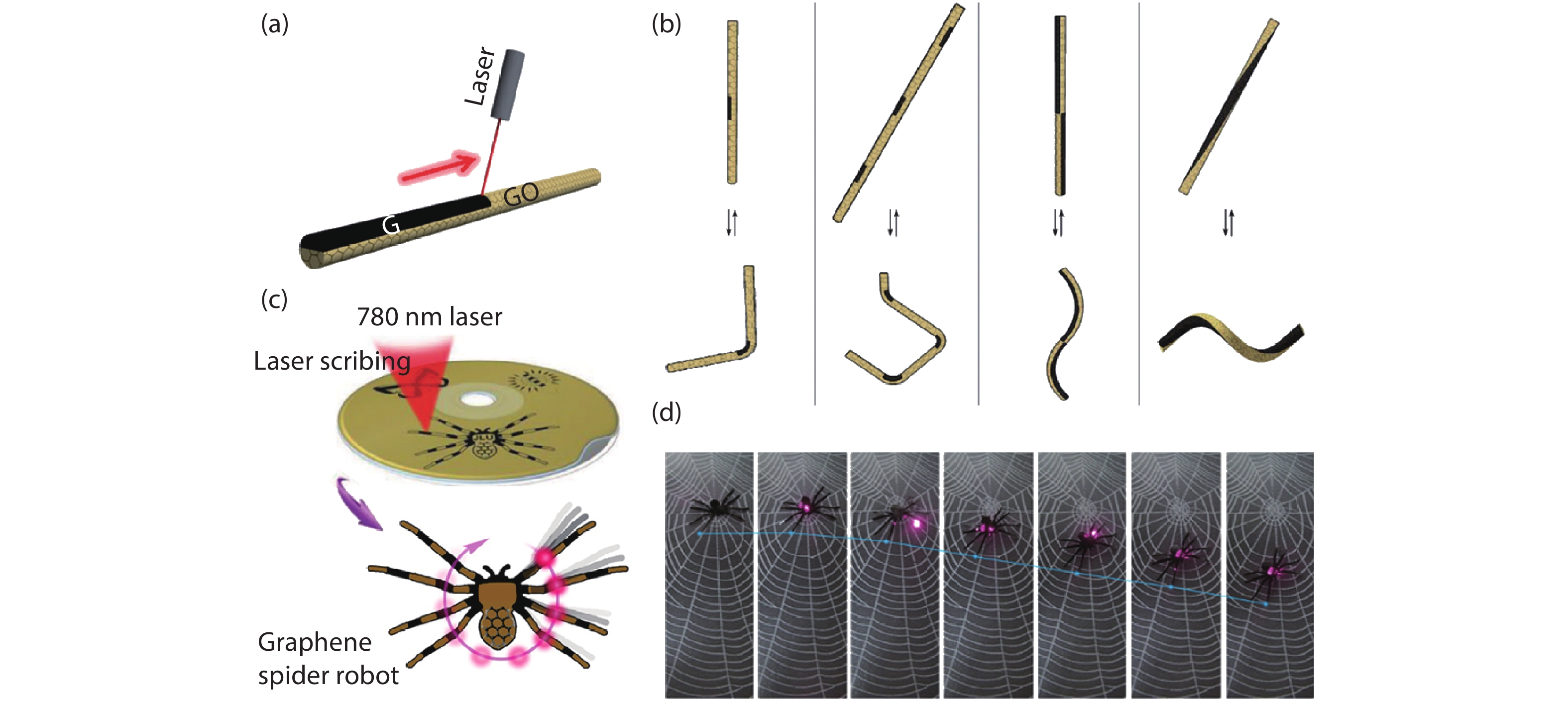
After the rapid progress of laser fabrication technique these years, laser fabrication becomes more developed and powerful. Especially, in the case of processing graphene-related materials, no matter the surface/interface properties or the physical/chemical properties of graphene can be well controlled. Problems with respect to the modification, patterning, structuring and integration in manufacturing graphene-based soft robots can be overcome with the help of laser fabrication. According to different working principles, laser fabrication strategies can be divided into different categories, such as laser direct writing, two-beam laser interference, laser lithography, and spatial light modulation processing[5]. Choosing reasonable methods may provide more possibilities for broad applications of robots. For example, complex 3D structures are directly constructed by using a laser direct writing process. Taking advantages of the high precision and three-dimensional processing ability of femtosecond laser fabrication, Qu et al. demonstrated the local reduction of non-planar GO fiber (Figs. 1(a) and 1(b)) and produced a moisture responsive fiber robot[6]. Mask-free patterning capability is quite helpful to fabricate various predesigned 2D/3D structures. Following the deformation of materials, laser fabrication also enables 4D printing, making robots reconfigurable to adapt to the environment. For instance, a vivid spider robot that integrated a variety of light active actuators was produced by using a simple laser-scribing method (Figs. 1(c) and 1(d))[7]. In this process, GO was converted into reduced GO (RGO) with greatly improved photothermal conversion efficiencies. Laser with high energy density is used for cutting, welding or ablation process, thereby kirigami/origami robots are made, making soft robots easy-to-reach in daily life.

Figure 1.(Color online) (a) Laser reduction of GO fiber. (b) Various predesigned GO actuators. (c) Graphene spider robot made by one-step laser scribing method. (d) The walking spider robot.
In summary, soft robots are still at an early stage and have a long way to go. Laser fabrication of graphene materials reveals great potential for developing graphene-based soft robotics. Graphene with tunable thermal/electronic conductivities, hierarchical structures and controllable surface morphologies has been successfully realized via laser processing. Various graphene actuators have been made in response to different stimuli such as humidity, light, heat and electricity, which will benefit robots with more functionality. We deem that graphene-based soft robots that can be applied in a wide range of scientific and industrial fields will be highly anticipated in the near future.
Acknowledgment
This work was supported by the National Natural Science Foundation of China (NSFC) under Grant Nos. #61935008, #61522503, #61590930, #61775078, and #61605055.
References
[1] H Cheng, g Y Huang, i G Shi et al. Graphene-based functional architectures: sheets regulation and macrostructure construction toward actuators and power generators. Acc Chem Res, 50, 1663(2017).
[2] L Chen, g M Weng, Z Zhou et al. Large-deformation curling actuators based on carbon nanotube composite: advanced-structure design and biomimetic application. ACS Nano, 9, 12189(2015).
[3] Y Hu, u G Wu, n T Lan et al. A graphene-based bimorph structure for design of high performance photoactuators. Adv Mater, 27, 7867(2015).
[4] Y Dong, g J Wang, o X Guo et al. Multi-stimuli-responsive programmable biomimetic actuator. Nat Commun, 10, 4087(2019).
[5] R You, u Y Q Liu, o Y L Hao et al. Laser fabrication of graphene-based flexible electronics. Adv Mater, 1901981(2019).
[6] H Cheng, J Liu, o Y Zhao et al. Graphene fibers with predetermined deformation as moisture-triggered actuators and robots. Angew Chem Int Ed, 52, 10482(2013).
[7] B Han, g Y L Zhang, u L Zhu et al. Plasmonic-assisted graphene oxide artificial muscles. Adv Mater, 31, 1806386(2019).