
Ligang Li, Yujie Guo, Lin Li, Xianfeng Hao, Jiucai Jin, Deqing Liu, Yongshou Dai. Target Detection of Shipborne Lidar Based on Variable Size Grid Map[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0828002
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0828002 (2022)
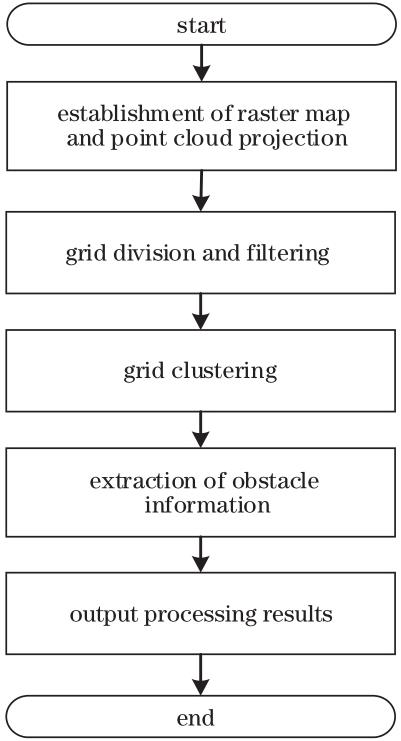
Fig. 1. Flowchart of lidar obstacle detection algorithm based on variable size grid map
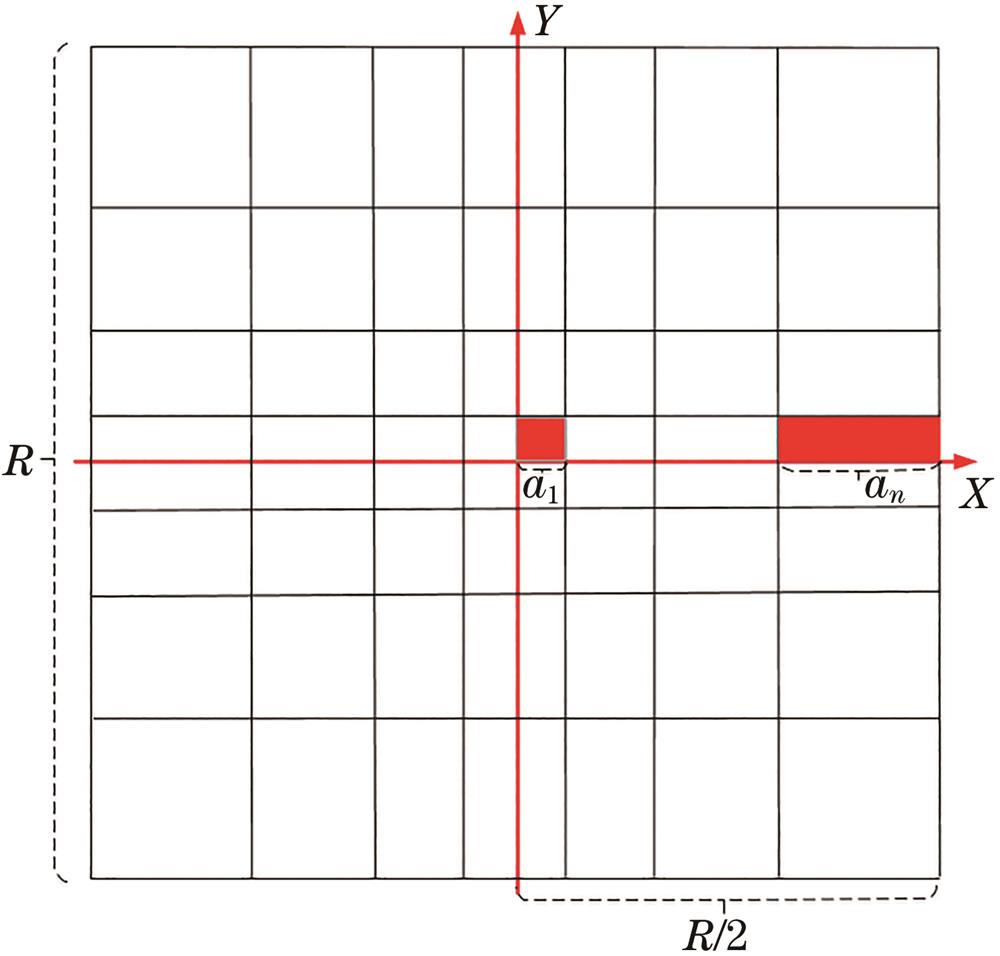
Fig. 2. Schematic of variable size raster map
Fig. 3. Flowchart of point cloud projection
Fig. 4. Experimental scene and original point cloud map. (a) Experimental scene; (b) point cloud image
Fig. 5. Processing effect of different methods. (a) Processing effect of method 1 when the grid size is 1
|
Table 1. Performance parameters of lidar
|
Table 2. Detection results of different methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20