
Kun Zhang, Shiquan Qiao, Wanzhen Zhou. Point Cloud Segmentation Based on Three-Dimensional Shape Matching[J]. Laser & Optoelectronics Progress, 2018, 55(12): 121011
- Laser & Optoelectronics Progress
- Vol. 55, Issue 12, 121011 (2018)
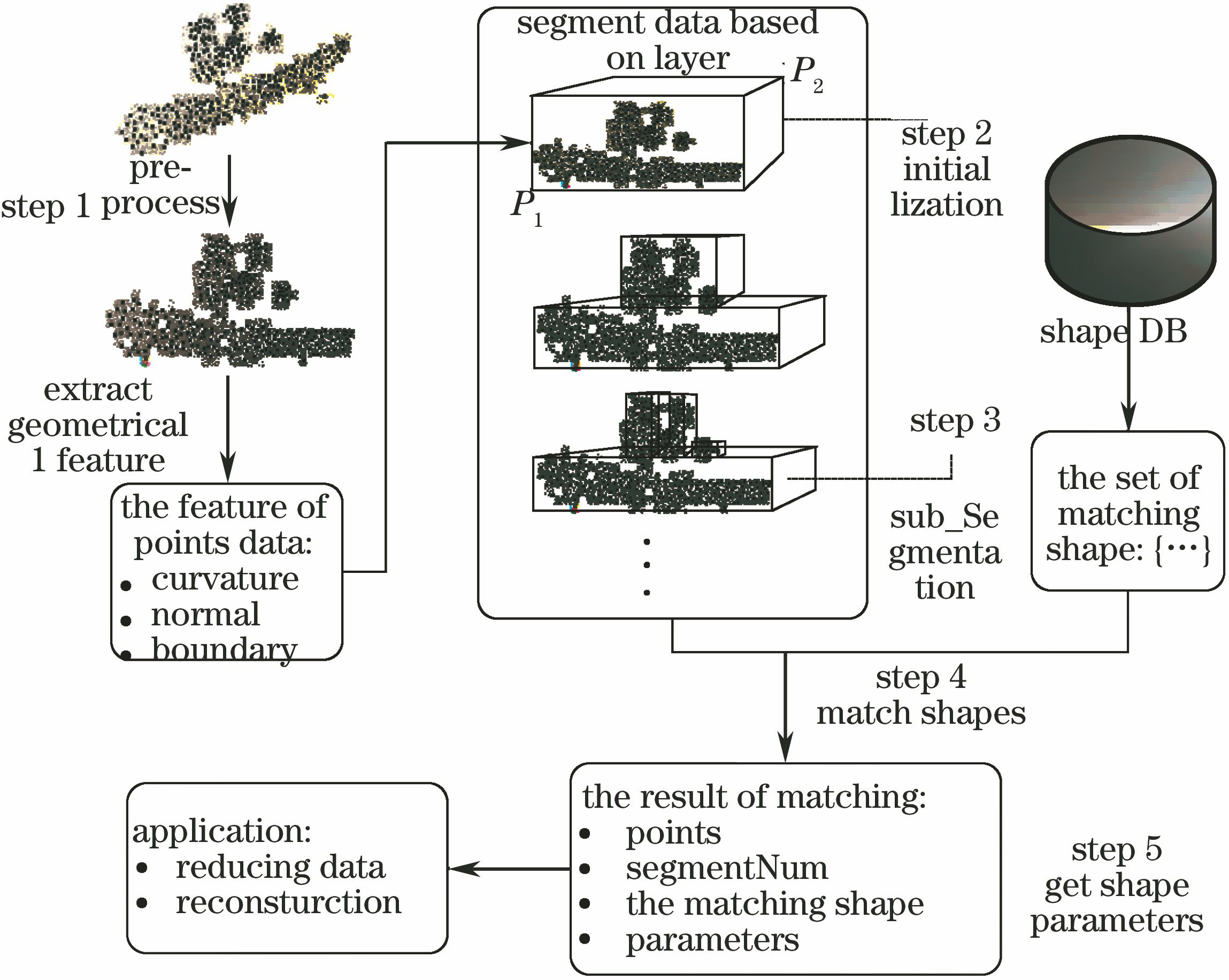
Fig. 1. Schematic of region segmentation based on 3D shape matching
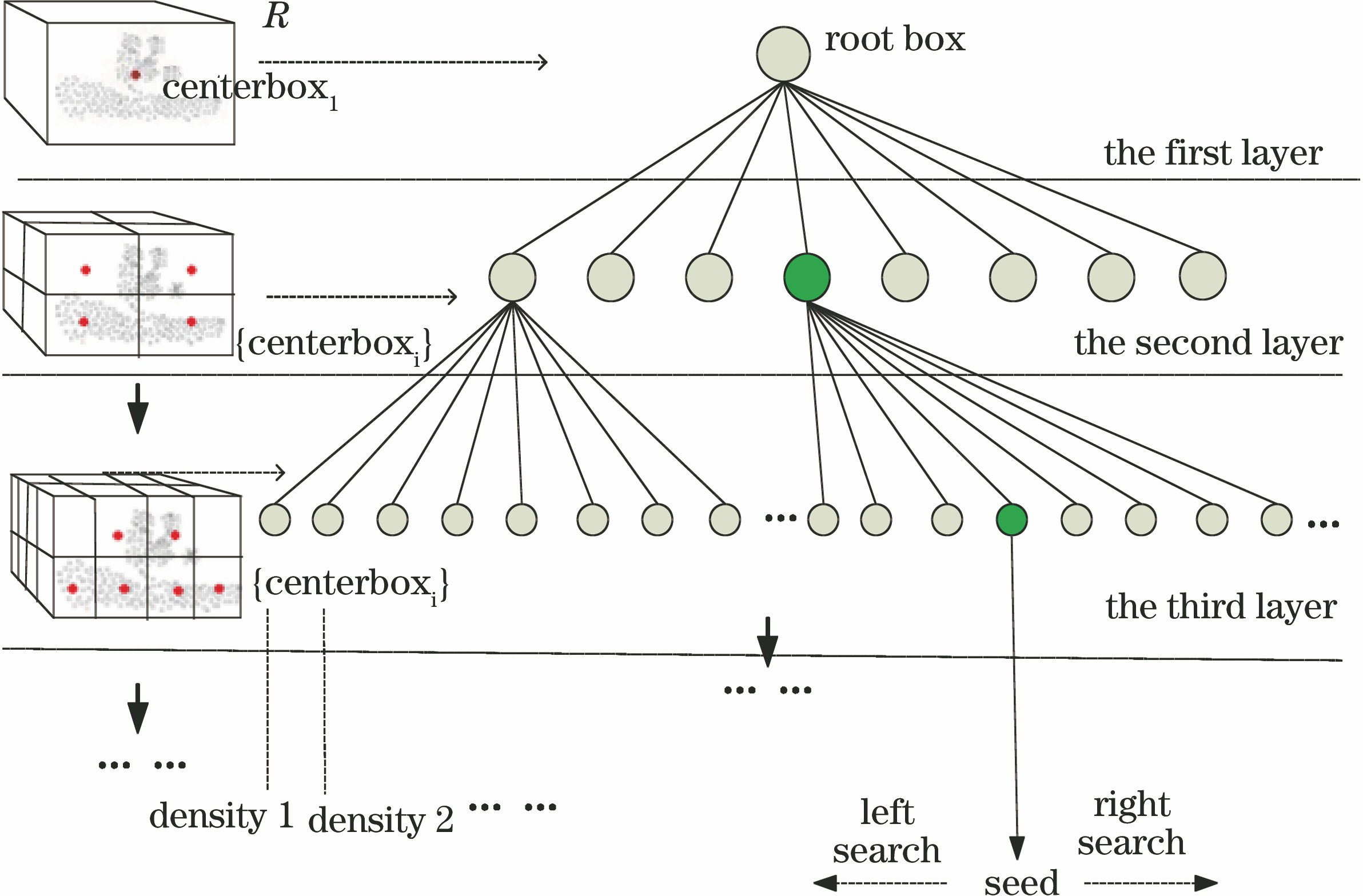
Fig. 2. Schematic of bidirectional linear octree data organization
Fig. 3. Comparison of the position of the boundary box and the original image
Fig. 4. Diagram of inconsistent point cloud parameters. (a) Point clouds data; (b)reorganized data; (c) curved surface
Fig. 5. Inconsistent estimated by angle of normal
Fig. 6. Effect of consistence segmentation
Fig. 7. Histogram of curvature of regular shape
Fig. 8. Effect of bidirectional linear octree data organization. (a) Bunny={BBoxi}; (b) Bunny: {Ncenterboxi}; (c) Dragon={BBoxi}; (d) Dragon: {Ncenterboxi}
Fig. 9. Comparison of density before and after data preprocessing. (a) Voxel; (b) box
Fig. 10. Boundary box for different objects in a multi-object scenario. (a) Boundary box for different objects; (b) original image
Fig. 11. Results of segmentation algorithms using Bunny data set. (a) Region growing; (b) RANSAC (plane); (c) RANSAC (sphere); (d) RANSAC (cylinder); (e) K-means; (f) SS
Fig. 12. Results of segmentation algorithms using Coal data set. (a) Region growing; (b) RANSAC (plane); (c) RANSAC (sphere); (d) RANSAC (cylinder); (e) K-means; (f) SS; (g) measured object
Fig. 13. Contrast of consistency among the regions
Fig. 14. Contrast of shape uncertainty among the regions
Fig. 15. Contrast of algorithm running time
| |||||||||||||||||||||||||||||||||||
Table 1. Experiment data set

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20