
Jiang’an Wang, Jiao He, Dawei Pang. Point Cloud Classification and Segmentation Network Based on Dynamic Graph Convolutional Network[J]. Laser & Optoelectronics Progress, 2021, 58(12): 1215008
- Laser & Optoelectronics Progress
- Vol. 58, Issue 12, 1215008 (2021)
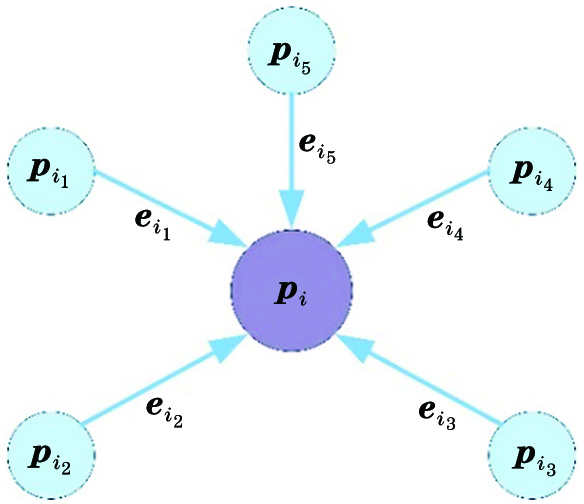
Fig. 1. Local digraph of point cloud
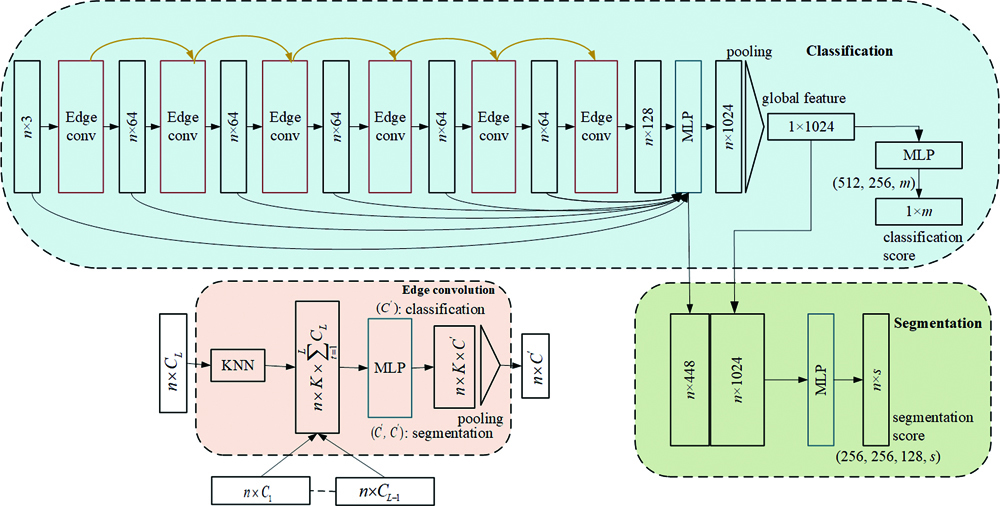
Fig. 2. Linked-DGCNN network structure
Fig. 3. Classification test accuracy curve
Fig. 4. Training loss curve
Fig. 5. Comparison of the segmentation results of the algorithm in this paper and DGCNN for object components in the ShapeNet dataset. (a)Ground truth; (b)DGCNN; (c)DGCNN_diff; (d)Linked-DGCNN; (e)Linked-DGCNN_diff
Fig. 6. Influence of number of EdgeConv convolution layers on accuracy
Fig. 7. Influence of K value on accuracy
Fig. 8. Effect of number of different sampling points on classification accuracy. (a) DGCNN; (b) Linked-DGCNN
|
Table 1. Results of dataset point cloud classification of ModelNet40
|
Table 2. Segmentation accuracy of object components in ShapeNet dataset unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20