
Yongkun Fan, Zhengdao Zhang, Li Peng. Vehicle Tracking Algorithm Based on Scale Search[J]. Laser & Optoelectronics Progress, 2019, 56(22): 221501
- Laser & Optoelectronics Progress
- Vol. 56, Issue 22, 221501 (2019)
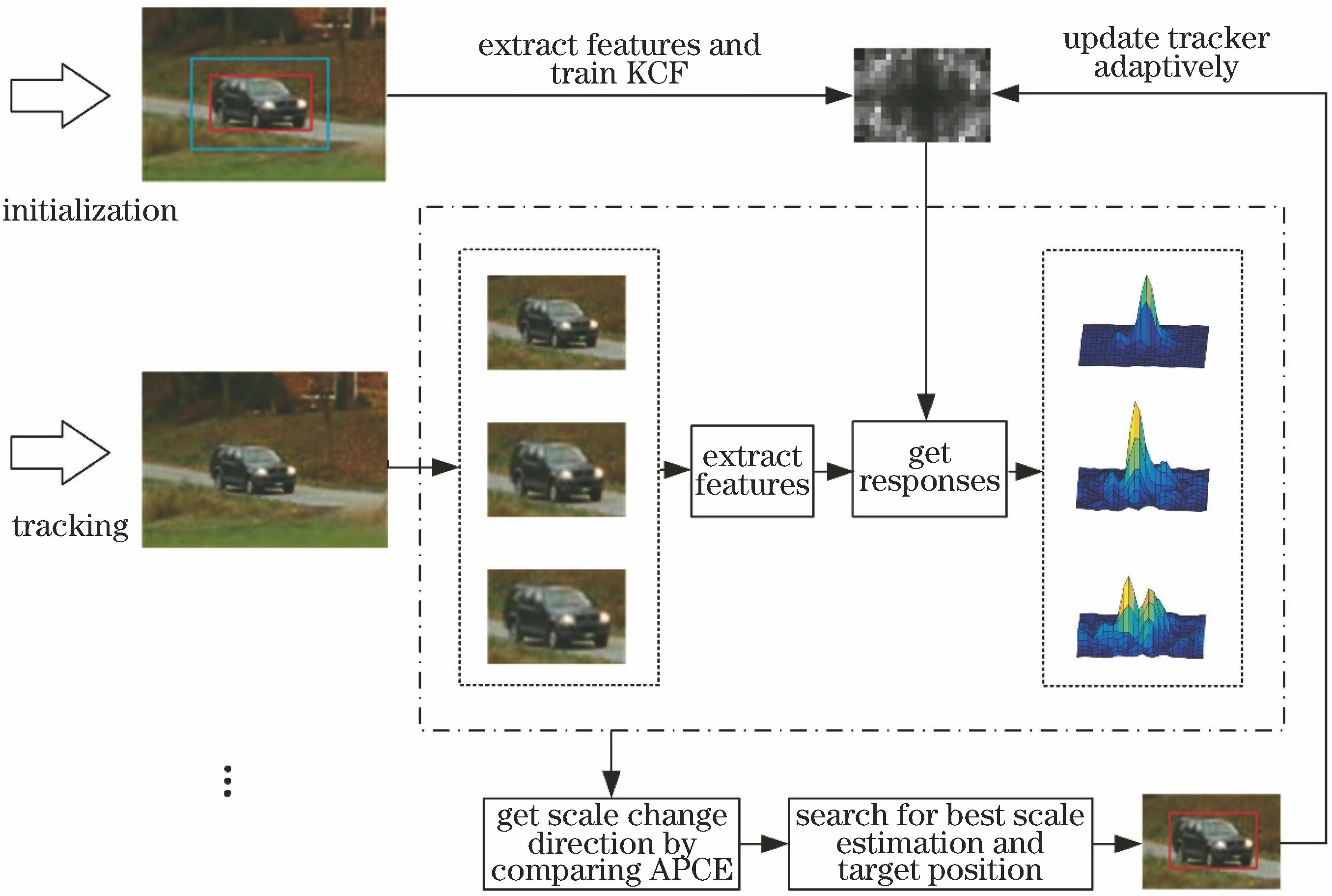
Fig. 1. Overview of vehicle tracking algorithm based on scale search
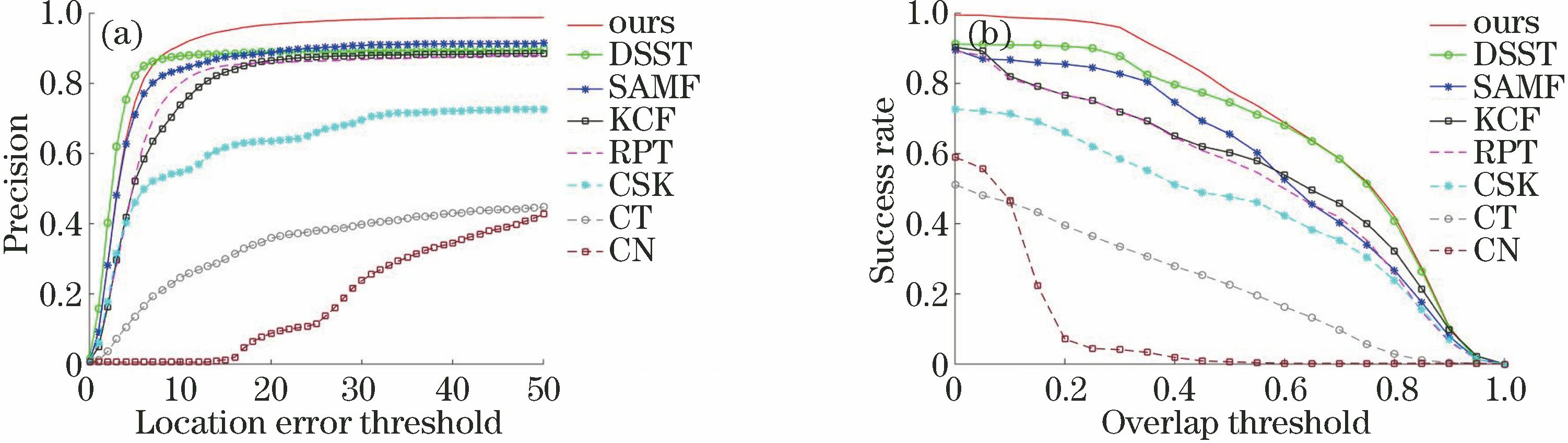
Fig. 2. Overall performance of each algorithm. (a) Location precision; (b) success rate
Fig. 3. Tracking renderings of partial video sequences. (a) BlurCar1-OTB; (b) BlurCar2-OTB; (c) Car1-OTB; (d) Car7-UAV; (e) Car24-OTB; (f) CarDark-OTB
|
Table 1. Overall performance of each algorithm
| ||||||||||||||||||||||||||||||||||
Table 2. Performance comparison of fixed weight update and adaptive weight update
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3. Performance of each algorithm under different factors

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20