
Zhaoxiang Jiang, Zhan Song, Zhenzhong Xiao, Xuan Ma, Shaoguang Shi, Fei Wang. Triangular Series Fitting-Based Harmonic Error Correction Method for Indirect Time-of-Flight Camera[J]. Laser & Optoelectronics Progress, 2023, 60(8): 0811028
- Laser & Optoelectronics Progress
- Vol. 60, Issue 8, 0811028 (2023)
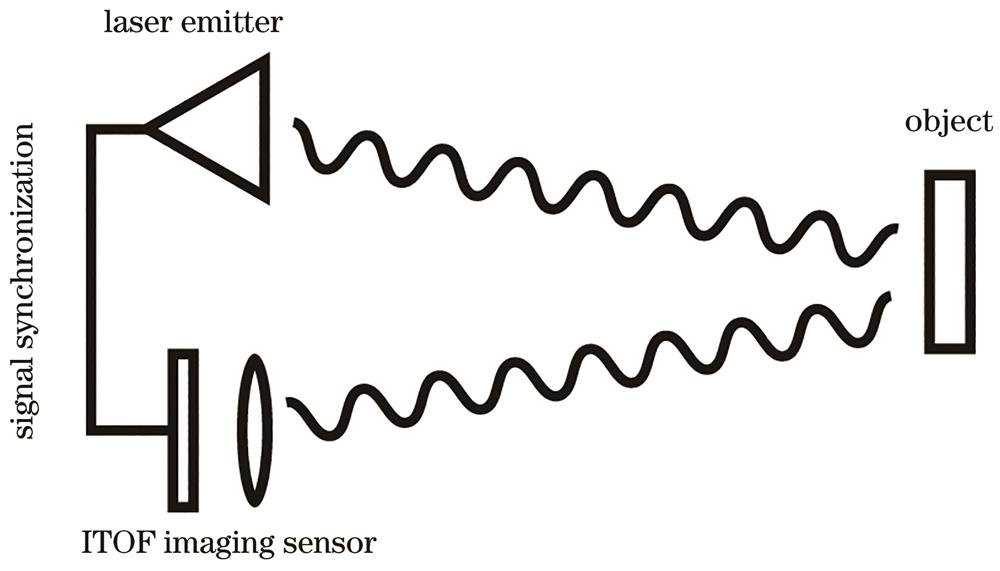
Fig. 1. Measurement schematic diagram of the ITOF camera
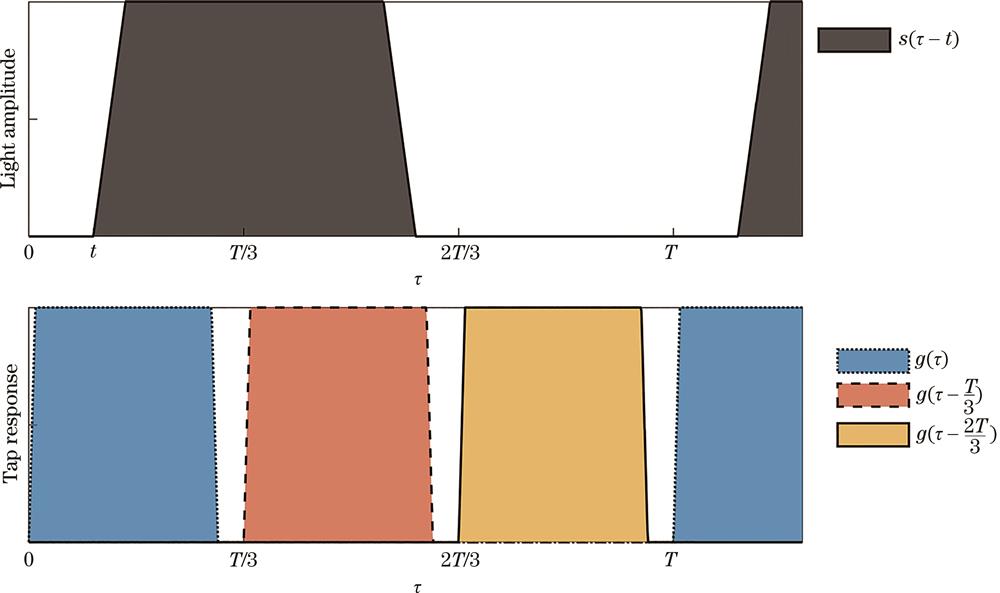
Fig. 2. Incident light amplitude and tap response of the ITOF pixel
Fig. 3. Simulation of harmonic error of a 3-tap ITOF camera. (a) Correlation signal; (b) non-linear relationship between
Fig. 4. Harmonic error calibration instrument
Fig. 5. Harmonic error fitting for principle point pixel
Fig. 6. Point cloud and fitted plane of 1500 mm, 1700 mm, and 2000 mm planes. (a) (c) (e) Before harmonic error correction; (b) (d) (f) after harmonic error correction
|
Table 1. Distance period, root mean square error (RMSE) of calibration data and validation data for different highest fitting order
|
Table 2. RMSE of plane fitting of point cloud data from 1400 mm to 2000 mm plane before and after harmonic error correction


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20