
Xin Yang, Shibiao Wei, Shanshan Kou, Fei Yuan, En Cheng. Misalignment measurement of optical vortex beam in free space[J]. Chinese Optics Letters, 2019, 17(9): 090604
- Chinese Optics Letters
- Vol. 17, Issue 9, 090604 (2019)
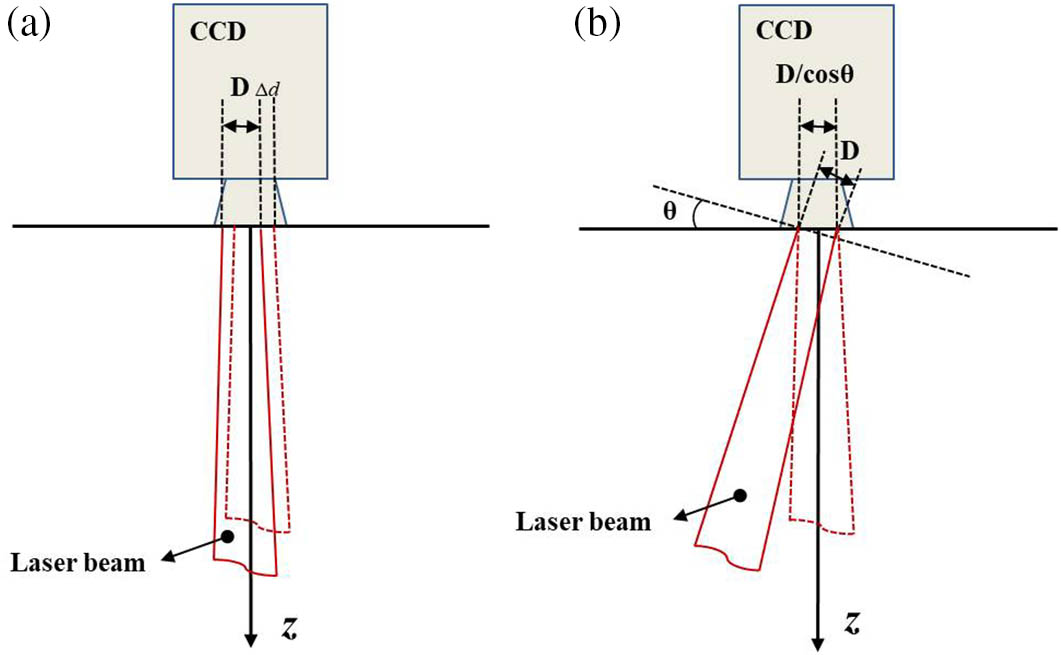
Fig. 1. Top view along the
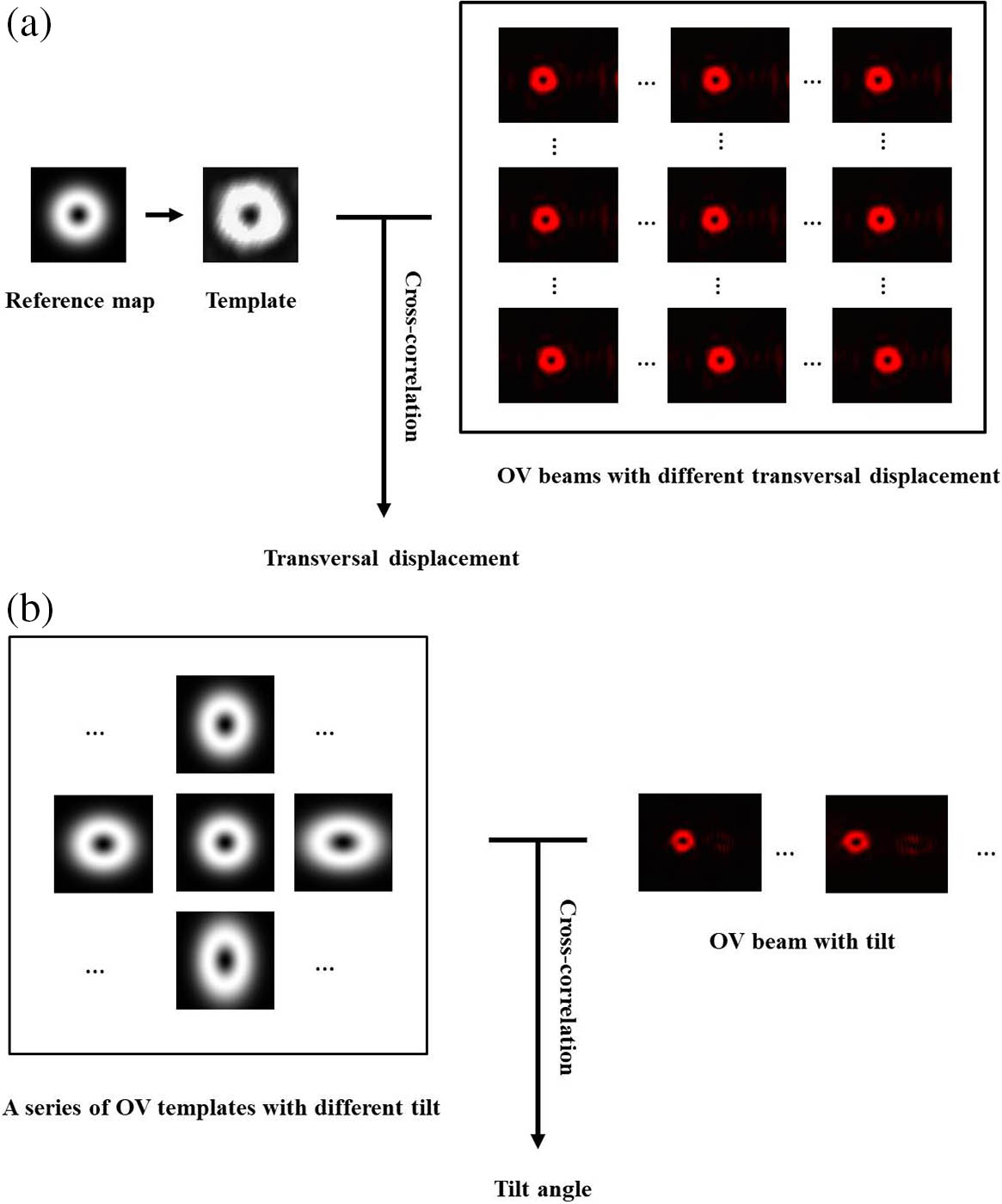
Fig. 2. Flowcharts for measurement of misalignments of the OV beam. (a) Transversal displacements of various OV maps as captured by our experimental setup and measured using the cross-correlation algorithm. A template of an OV beam is obtained by performing a cross-correlation between a reference OV map simulated according to the experimental conditions and an OV map with no transversal displacement. (b) The tilt of the OV map can be determined by simulating a set of OV templates with set tilt angles and then cycling them with OV maps that have a tilt obtained using our method.
Fig. 3. Schematic of the experimental setup. In our system, a collimated laser beam is reflected by the spatial light modulator (SLM) to form an OV beam, and its image is acquired by a CCD camera. Adjustment of the optical 3D translation platform or the rotating platform beneath the CCD is performed to generate transversal displacement or tilt, respectively. The polarizer and spatial filter are used to collimate the laser beam. The SLM is used to transform the laser beam into an OV beam. The prism is a beam splitter. The blocker is used to block the laser beam. The CCD is used to image the OV beams with the different misalignments.
Fig. 4. Curves of cross-correlation of transversal displacements, where the red curve represents the original OV map with no transversal displacement, and the green curve is the OV map with the different transversal displacements. (a) Correlation coefficient curve for
Fig. 5. Curves of the cross-correlation of tilt, where the green curve represents the OV map with specific angles produced by cycling our algorithm with the reference maps of different tilts ranging from 15° to 35°, and where the maximum of each curve is marked using a red square. (a) Correlation coefficient curve of 15° tilt; (b) correlation coefficient curve of 20° tilt; (c) correlation coefficient curve of 25° tilt; and (d) correlation coefficient curve of 30° tilt.

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20