
Xin Yang, Shibiao Wei, Shanshan Kou, Fei Yuan, En Cheng. Misalignment measurement of optical vortex beam in free space[J]. Chinese Optics Letters, 2019, 17(9): 090604
- Chinese Optics Letters
- Vol. 17, Issue 9, 090604 (2019)
Abstract
Over the past few decades, some new types of optical beams with nonzero orbital angular momentum (OAM), and particularly Laguerre–Gaussian (LG) beams with a nonzero azimuthal index, have been attracting increasing attention[
![]()
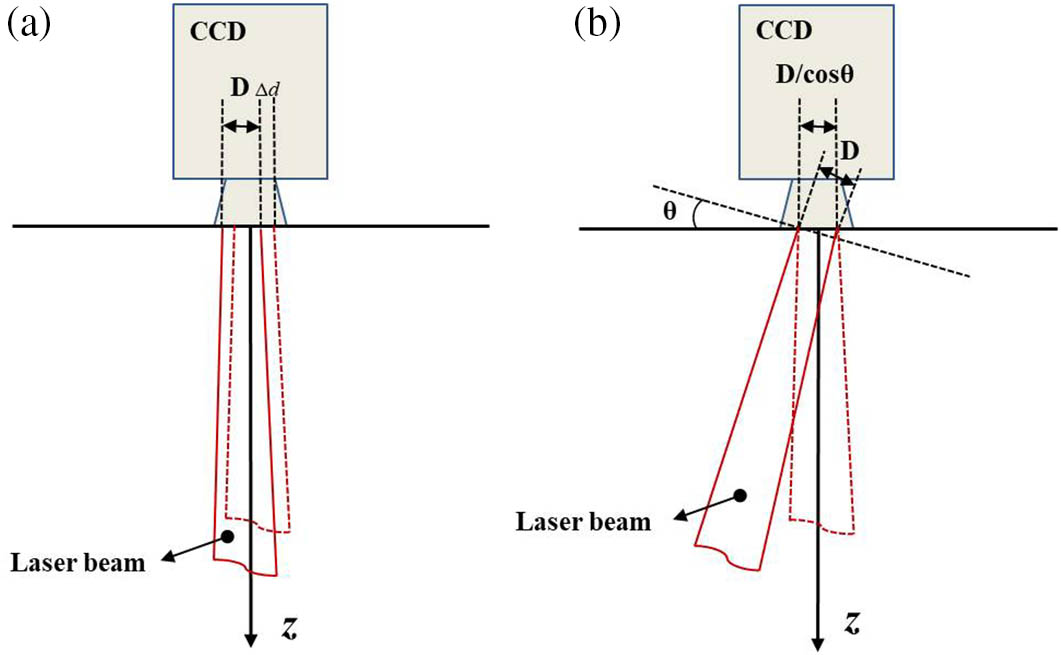
Figure 1.Top view along the
For example, in free space optical communications, an acquisition, tracking, and pointing (ATP) system[
An OV beam, unlike a Gaussian beam, consists of concentric rings with darkness at its center, and it suffers large-scale divergence during propagation, which causes a series of difficulties in the processes of positioning and tracking. In experimental situations in particular, an off-axis OV beam will occur in most cases, which will then lead to the asymmetry of the OV beam that reduces the accuracy of the other measurement algorithms[
Sign up for Chinese Optics Letters TOC. Get the latest issue of Chinese Optics Letters delivered right to you!Sign up now
In this Letter, an experimental system and a related algorithm that we refer to as the cross-correlation method in the remainder of the paper are proposed to measure a misaligned OV beam, including its transversal displacement and tilt. Comparison of the results measured using our system with those from the numerical simulations shows the good performance of our method in determining the misalignments of the OV beam. In addition, our method can play a crucial role under different conditions and is suitable for use with both Gaussian beams and OV beams in both numerical simulation and experimental situations.
In cylindrical coordinates, the amplitude distribution of an LG beam is shown as follows[
Using the mathematical equations given above, we simulate an LG beam with
In the numerical simulation of an OV beam, we can easily extract the required reference map from the image. However, in an experimental situation, the size of the light spot may differ from that in the simulated results. Therefore, using
An OV beam is generally produced by a Gaussian beam with a spiral wavefront phase. This beam inherits the properties of the laser beam. While there is some diffusion and deformation when an OV beam propagates in a medium, the intensity and shape of the beam remain almost entirely constant. Therefore, the results of cross-correlation operations between the template and the OV images with different misalignments can be determined stably and easily:
The proposed algorithm to calculate the transversal displacement consists of three steps. In the first step, we simulate a reference map for an OV beam with a marked center, and a template, which shows great similarity to the reference map, is obtained by performing a cross-correlation using the appropriate algorithm between the reference map and the original OV image. In the second step, cross-correlation operations are performed through most of the pixels of the entire map that shows the transversal displacement using the previously prepared template. In the final step, the transversal displacement of the OV beam is the distance between the two points with the maximum values after the cross-correlation operation. When measuring the tilt of the OV beam, we use a series of templates with set angles to perform the cross-correlation operation with the OV maps that are to be tested. Using the LG beam as an example, we studied the LG beam intensity profile and then carried out an optical experiment to verify the proposed method. A specific illustration of the use of our algorithm is shown in Fig.
![]()
Figure 2.Flowcharts for measurement of misalignments of the OV beam. (a) Transversal displacements of various OV maps as captured by our experimental setup and measured using the cross-correlation algorithm. A template of an OV beam is obtained by performing a cross-correlation between a reference OV map simulated according to the experimental conditions and an OV map with no transversal displacement. (b) The tilt of the OV map can be determined by simulating a set of OV templates with set tilt angles and then cycling them with OV maps that have a tilt obtained using our method.
An experimental setup was built to test our method, as illustrated schematically in Fig
![]()
Figure 3.Schematic of the experimental setup. In our system, a collimated laser beam is reflected by the spatial light modulator (SLM) to form an OV beam, and its image is acquired by a CCD camera. Adjustment of the optical 3D translation platform or the rotating platform beneath the CCD is performed to generate transversal displacement or tilt, respectively. The polarizer and spatial filter are used to collimate the laser beam. The SLM is used to transform the laser beam into an OV beam. The prism is a beam splitter. The blocker is used to block the laser beam. The CCD is used to image the OV beams with the different misalignments.
An optical 3D translation platform or a rotation platform was placed beneath the CCD camera to obtain images of the different misalignments of the OV beam that were used to verify our algorithm. Here, we use the transversal displacement of the CCD camera rather than the translation of the entire light path because there is a relative motion between them. The minimum scale of the optical three-dimensional (3D) translation platform is
To test the basic performance of the experimental system, we first observed images of the vortex beams generated by the LCSLM shown in Fig.
Under ideal simulation conditions, we selected
In a similar manner, under the experimental conditions, a Gaussian beam emitted from a He–Ne laser passed through our experimental setup to form an OV beam. By translating the optical 3D translation platform with an
Using the OV beam template that was obtained using the methods described above, we cycled our template through the series of OV images. We then compared the maximum values of
![]()
Figure 4.Curves of cross-correlation of transversal displacements, where the red curve represents the original OV map with no transversal displacement, and the green curve is the OV map with the different transversal displacements. (a) Correlation coefficient curve for
By calculating the maxima of the red and green curves, we can obtain the transversal displacements of the OV beams. The results obtained under the numerical conditions are perfectly matched with the preset offsets. The offsets that were calculated under the experimental conditions are 3, 6, 14, 29, 58, and 140. By multiplying these results by the minimum size of one pixel of the CCD camera, which is 3.6 µm, we obtained corresponding final transversal displacements of 10.8, 21.6, 50.4, 104.4, 208.8, and 504 µm, respectively, which were well matched with the true values to a large extent.
Therefore, we obtained one pixel displacement resolution at the numerical simulation conditions and
Tilt determination is slightly different to transversal displacement detection, but we can also use our proposed algorithm to measure tilt. Figure
Under numerical conditions, we can set a group of OV beams with different tilts so that we can detect various tilt angles by finding the maximum value of
![]()
Figure 5.Curves of the cross-correlation of tilt, where the green curve represents the OV map with specific angles produced by cycling our algorithm with the reference maps of different tilts ranging from 15° to 35°, and where the maximum of each curve is marked using a red square. (a) Correlation coefficient curve of 15° tilt; (b) correlation coefficient curve of 20° tilt; (c) correlation coefficient curve of 25° tilt; and (d) correlation coefficient curve of 30° tilt.
From Fig.
While both transversal displacement and tilt would cause misalignment of the OV beam and introduce OAM spectrum dispersion, the latter is much more complex and critical.
The following part is focused on tilt determination. In fact, our method can handle different tilt situations. By simulating the OV reference maps for different types of tilt angle, we cycle the cross-correlation algorithm between these reference maps and the OV map captured using a CCD camera. After the maximal value of
Another problem is that when the tilt angle is less than 20°, the method may lose its effectiveness. As shown in Fig.
In summary, we have proposed a cross-correlation algorithm to determine the misalignment of an OV beam that includes transversal displacement and tilt under practical conditions when using some simple experimental equipment. The results showed high stability under various conditions and showed good agreement with the numerical simulation results; one pixel displacement of at least 0.01 mm was detected, and a tilt angle of approximately 0.01 rad was measured in our experiments. Because of the limitations of the experimental conditions, our method cannot measure all types of tilt. However, we have proposed some solutions to handle the shortcomings of our current algorithm. Additionally, our method shows good stability during the numerical simulations and is independent of the different misalignments of the OV beam (i.e., transversal displacement and tilt), which means that the proposed method can be used to determine these misalignments simultaneously.
References
[1] L. Allen, M. W. Beijersbergen, R. J. C. Spreeuw, J. P. Woerdman. Phys. Rev. A, 45, 8185(1992).
[2] L. Allen, M. J. Padgett, M. Babiker. Prog. Opt., 39, 291(1999).
[3] L. Allen, S. M. Barnett, M. J. Padgett. Optical Angular Momentum(2003).
[4] L. Tian, F. Ye, X. Chen. Opt. Express, 19, 11591(2011).
[5] M. Mirhosseini, M. Malik, Z. Shi, R. W. Boyd. Nat. Commun., 4, 2781(2013).
[6] W. Zhang, Q. Qi, J. Zhou, L. Chen. Phys. Rev. Lett., 112, 153601(2014).
[7] G. Gibson, J. Courtial, M. J. Padgett, M. Vasnetsov, V. Pas’ko, S. M. Barnett, S. Franke-Arnold. Opt. Express, 12, 5448(2004).
[8] Y. D. Liu, C. Gao, X. Qi, H. Weber. Opt. Express, 16, 7091(2008).
[9] M. Padgett, R. Bowman. Nat. Photon., 5, 343(2011).
[10] M. A. Lauterbach, M. Guillon, A. Soltani, V. Emiliani. Sci. Rep., 3, 2050(2013).
[11] G. Milione, T. Wang, J. Han, L. F. Bai. Chin. Opt. Lett., 15, 030012(2017).
[12] X. D. Chen, C. C. Chang, J. X. Pu. Chin. Opt. Lett., 15, 030006(2017).
[13] T. Jono, M. Toyoda, K. Nakagawa, A. Yamamoto, K. Shiratama, T. Kurii, Y. Koyama. Proc. SPIE, 3692, 41(1999).
[14] M. C. Amann, T. M. Bosch, M. Lescure, R. A. Myllylae, M. Rioux. Opt. Eng., 40, 10(2001).
[15] R. P. Mathur, C. I. Beard, D. J. Purll. Proc. SPIE, 1218, 129(1990).
[16] J. Lin, X. C. Yuan, M. Z. Chen, J. C. Dainty. J. Opt. Soc. Am. A, 27, 2337(2010).
[17] C. Huang, H. Huang, H. Toyoda, T. Inoue, H. Liu. Opt. Express, 20, 26099(2012).
[18] M. V. Vasnetsov, V. V. Slyusar, M. S. Soskin. Quantum Electron., 31, 464(2001).
[19] P. F. Ding, J. X. Pu. Acta Phys. Sin., 6, 031(2012).
[20] A. M. Yao, M. J. Padgett. Adv. Opt. Photon., 3, 161(2011).
[21] O. Pütsch, A. Temmler, J. Stollenwerk, E. Willenborg, P. Loosen. Proc. SPIE, 8843, 88430D(2013).

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20