
Mengkai Yuan, Xinjun Zhu, Linpeng Hou. Depth Estimation from Single-Frame Fringe Projection Patterns Based on R2U-Net[J]. Laser & Optoelectronics Progress, 2022, 59(16): 1610001
- Laser & Optoelectronics Progress
- Vol. 59, Issue 16, 1610001 (2022)
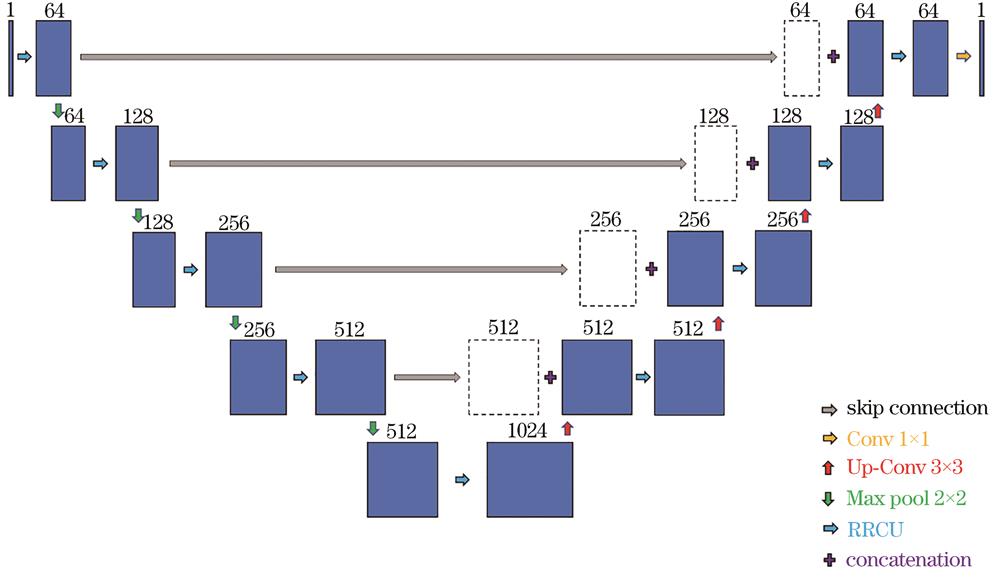
Fig. 1. Recurrent residual convolutional neural network based on U-Net
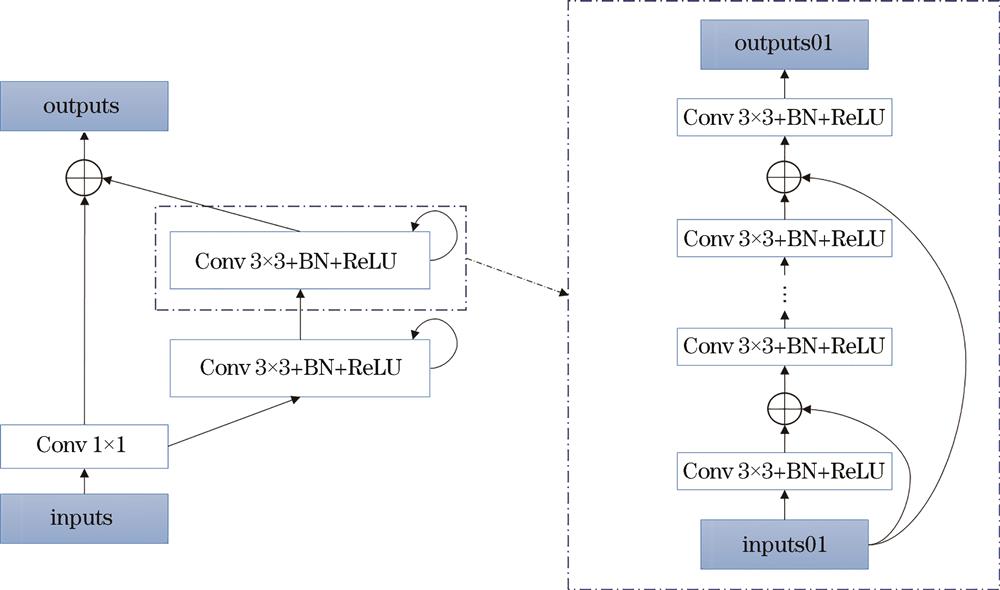
Fig. 2. Recurrent residual convolutional units and unfolded recurrent convolutional units
Fig. 3. Schematic diagram of proposed algorithm
Fig. 4. Simulated projection fringe pattern and simulated depth map. (a) Simulated projection fringe pattern; (b) simulated depth map
Fig. 5. Simulated training dataset
Fig. 6. Error of R2U-Net and U-Net under free noise testing samples
Fig. 7. Depth map prediction result of simulated data. (a) Simulated fringe pattern of test input; (b) depth map corresponding to fringe pattern; (c) prediction result of U-Net; (d) prediction result of R2U-Net; (e) comparison of 270th row of prediction result
Fig. 8. Comparison of R2U-Net method and FTM method. (a) Depth map corresponding to fringe pattern; (b) prediction result of R2U-Net; (c) result of FTM; (d) comparison of the 270th row of the prediction result
Fig. 9. Error of R2U-Net and U-Net under noisy testing samples
Fig. 10. Depth map prediction result of noise simulated data. (a) Simulated fringe pattern of test input; (b) depth map corresponding to fringe pattern; (c) prediction result of U-Net; (d) prediction result of R2U-Net; (e) comparison of 270th row of prediction result
Fig. 11. Comparison of R2U-Net method and FTM method (Noise simulation data). (a) Depth map corresponding to fringe pattern; (b) prediction result of R2U-Net; (c) result of FTM; (d) comparison of 270th row of prediction result
Fig. 12. Experimental training dataset
Fig. 13. Error of R2U-Net and U-Net under experimental testing samples
Fig. 14. Depth map prediction result of experimental sample. (a) Experimental fringe pattern of test input; (b) depth map corresponding to fringe pattern; (c) prediction result of U-Net; (d) prediction result of R2U-Net; (e) comparison of 310th row of prediction result
Fig. 15. Depth map prediction result of the second experimental sample. (a) Simulated fringe pattern of the test input; (b) depth map corresponding to fringe pattern; (c) prediction result of U-Net; (d) prediction result of R2U-Net; (e) comparison of 320th row of prediction result
|
Table 1. Comparison of three loss functions
|
Table 2. Performance evaluation of the two models

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20