
Peng Wang, Yingjie Zhang, Changku Sun, Duo Zhou. Multi-Camera Three-Dimensional Measurement System Using an Image Stitching Method Based on Flexible Calibration Target Positioning[J]. Acta Optica Sinica, 2020, 40(4): 0412003
- Acta Optica Sinica
- Vol. 40, Issue 4, 0412003 (2020)
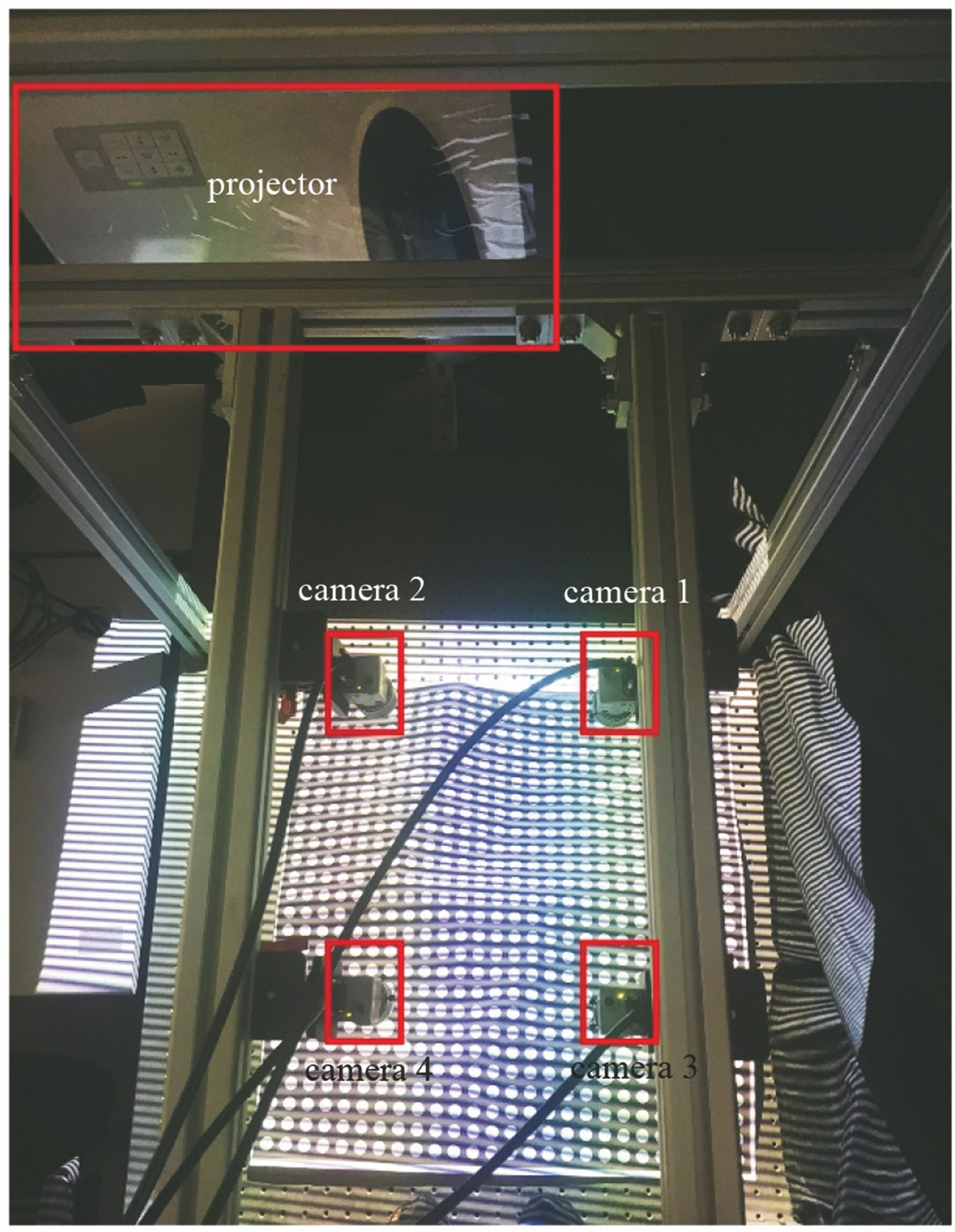
Fig. 1. Experimental setup for multi-camera three-dimensional shape measuring system using digital fringe projection techniques
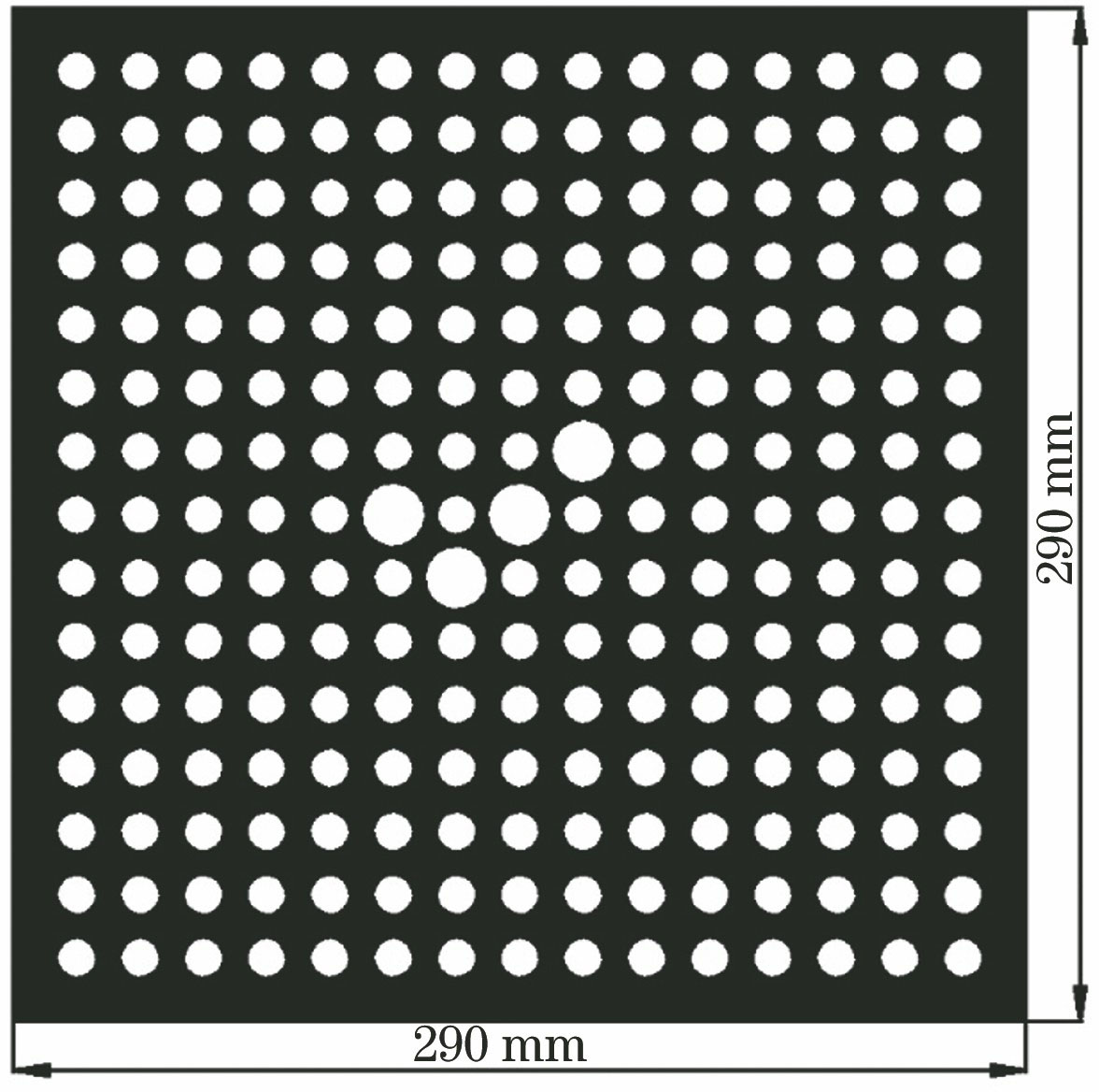
Fig. 2. Directional circular pattern for planar calibration target
Fig. 3. (a)-(d) Images of the flexible calibration target grabbed by different cameras. (a) Camera 1; (b) camera 2; (c) camera 3; (d) camera 4. (e)-(h) Images grabbed by camera 1 of the flexible calibration target with different shapes. (e) Shape 1; (f) shape 2; (g) shape 3; (h) shape 4
Fig. 4. Calibration error diagram from camera 2 to camera 1 in quaternary quadratic model
Fig. 5. Measurement results of 4 different polynomial models. (a) Ternary quadratic model; (b) ternary cubic model; (c) quaternary quadratic model; (d) quaternary cubic model
Fig. 6. Measurement results of different FOV overlapping. (a) 1/2; (b)1/3; (c) 1/4; (d) 1/6
Fig. 7. Image of multiple objects to be measured
Fig. 8. 3D reconstruction images. (a) Camera 1; (b) camera 2; (c) camera 3; (d) camera 4; (e) merged image
Fig. 9. Step standard block and its size
Fig. 10. 3D reconstruction image of the step standard block by camera 2 using (a) method 1 and (b) method 2
Fig. 11. Standard ball
Fig. 12. Fitted spheres based on the spherical crown point cloud
|
Table 1. Measurement results of the step standard block
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Measurement results of the sphere center distance

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20