
Bin Wu, Dong Ye, Yubo Guo, Gang Chen. Multiple Circle Recognition and Pose Estimation for Aerospace Applications[J]. Acta Optica Sinica, 2017, 37(9): 0915004
- Acta Optica Sinica
- Vol. 37, Issue 9, 0915004 (2017)
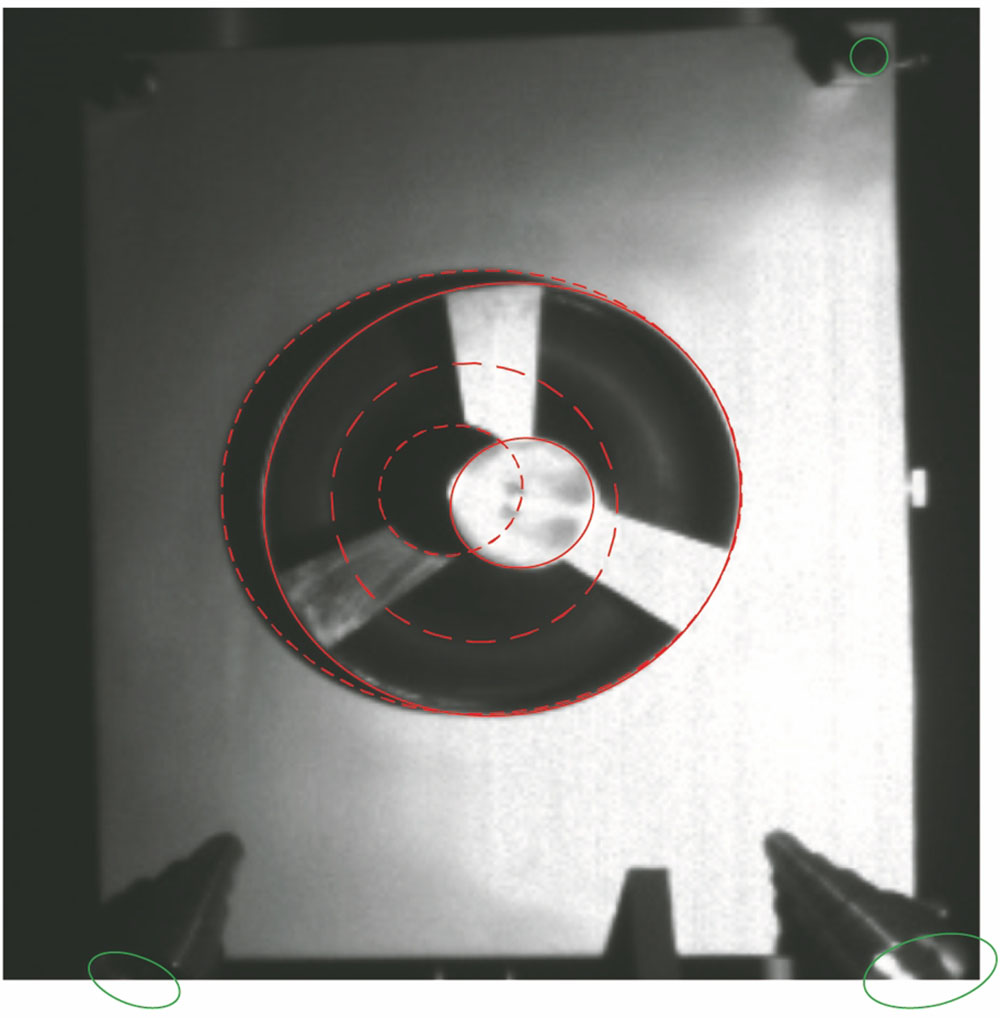
Fig. 1. Fake ellipses generated by shadows (red dotted line), ellipses generated by projection of SOR (red solid line), and other ellipses (green solid line)
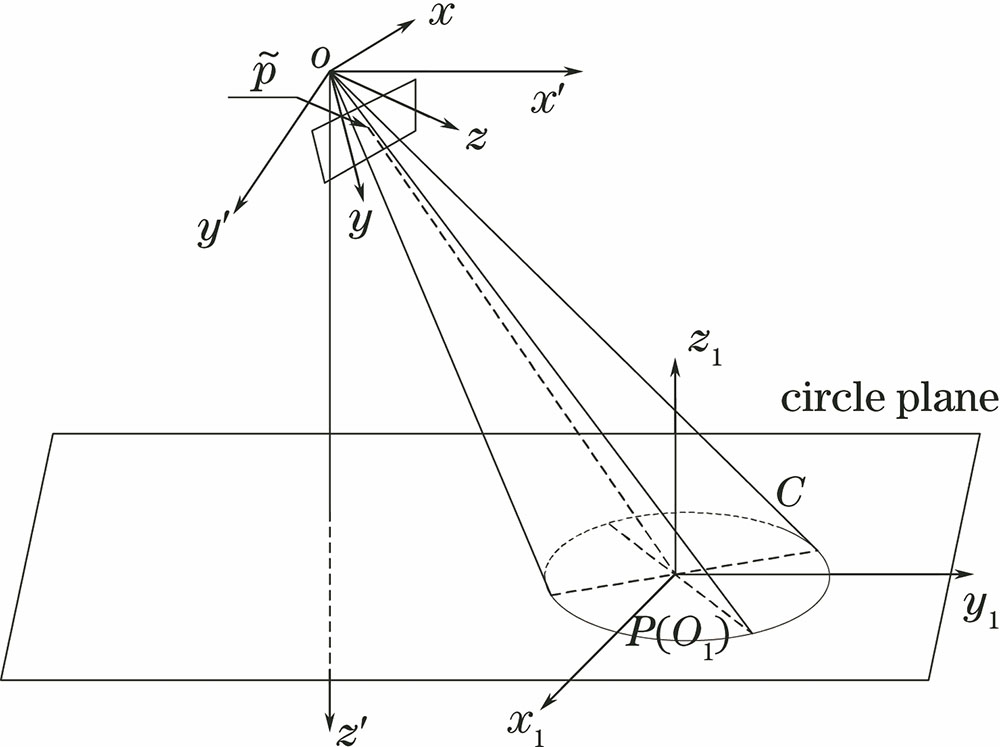
Fig. 2. Coordinate systems and their transformation
Fig. 3. Vertical constraint
Fig. 4. (a) Four space circles of SOR; (b) imaging of the space circle; (c) image with four random ellipses as well as 8% salt and pepper noise
Fig. 5. Examples of simulation (blue) and classification results (red) for synthetic images
Fig. 6. Pose estimation error as a function of distance. (a) Error of angle; (b) error of translation
Fig. 7. (a) Experimental system; (b) satellite mockup
Fig. 8. Real images and classification results
Fig. 9. Pose estimation error as a function of distance. (a) Error of angle; (b) error of translation
Fig. 10. Estimation errors of pose angles. (a) Pitch angle; (b) yaw angle
| |||||||||||||||||||||||||||||||||||
Table 1. Precision of classification
|
Table 2. Pose estimation results for synthetic images
|
Table 3. Pose estimation results for real images

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20