Author Affiliations
1College of Information Science and Technology, Bohai University, Jinzhou 121013, Liaoning, China2China Electronics Technology Taiji (Group) Co., Ltd., Beijing 100083, Chinashow less
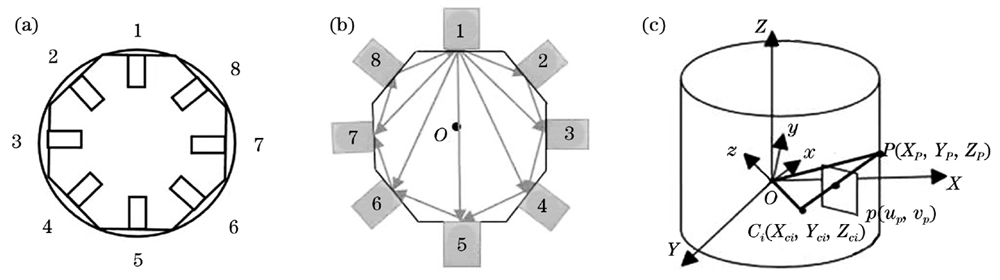
Fig. 1. Eight-combination panoramic camera system. (a) Top view of panoramic camera; (b) vector relation diagram;(c) strict cylindrical projection model figure
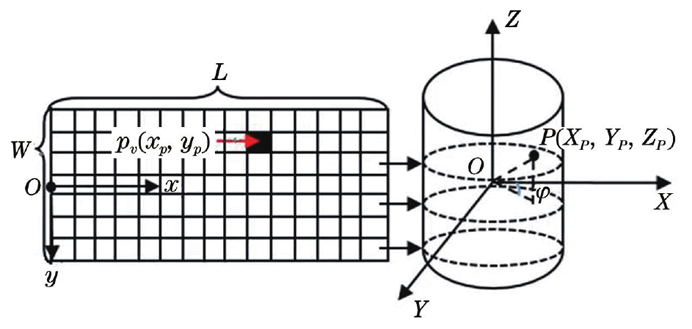
Fig. 2. Transformation diagram from panoramic plane coordinate system to panoramic cylindrical coordinate system
Fig. 3. Overlapping architecture of panoramic camera system
Fig. 4. Panoramic camera system architecture
Fig. 5. Single-cylinder and multiple cylinders panoramic stitching methods. (a) r=3989.4 mm; (b) r1=1510 mm, r2=2300 mm, r3=2900 mm, r4=2300 mm, r5=1480 mm, r6=2100 mm, r7=2930 mm, r8=2780 mm
Fig. 6. Panoramic images from direct and indirect methods. (a) Direct method; (b) indirect method
| Camera | α /(°) | β /(°) | γ /(°) | X /cm | Y /cm | Z /cm |
|---|
| Camera 1 | 0 | 0 | 0 | 0.0238 | 4.0950 | 0.3325 | | Cameras 1-2 | -0.0248 | 0.6691 | -0.0285 | 3.2273 | 2.5220 | 1.1306 | | Cameras 2-3 | 0.0838 | 0.6387 | 0.0802 | 4.8675 | -1.0091 | 1.6011 | | Cameras 3-4 | -0.0210 | 0.8555 | 0.0715 | 3.0778 | -4.3322 | 0.8516 | | Cameras 4-5 | -0.0505 | 0.7016 | 0.0234 | 0.9727 | -5.1819 | -0.5938 | | Cameras 5-6 | -0.0485 | 0.5106 | 0.0760 | -4.8667 | -1.5885 | -1.2025 | | Cameras 6-7 | 0.1119 | 0.7537 | -0.0580 | -3.0730 | 1.3413 | -1.7926 | | Cameras 7-8 | 0.0116 | 0.7006 | 0.0207 | -2.2840 | 4.1536 | 0.6732 |
|
Table 1. Relative orientation elements of combined cameras
| Camera | RMSE in x direction | RMSE in y direction | Total RMSE in x and y directions | Max error in x direction | Max error in y direction |
|---|
| A (1-2) | 1.86 | 0.22 | 1.87 | 3.0839844 | 0.8300781 | | B (1-2) | 0.18 | 0.20 | 0.26 | 0.6301269 | 0.5999023 | | A (2-3) | 1.53 | 0.20 | 1.54 | 2.8520203 | 0.6999512 | | B (2-3) | 0.17 | 0.16 | 0.23 | 0.6000976 | 0.5998535 | | A (3-4) | 1.21 | 0.16 | 1.22 | 2.8099976 | 0.7309875 | | B (3-4) | 0.09 | 0.15 | 0.17 | 0.5400390 | 0.4454994 | | A (4-5) | 1.47 | 0.19 | 1.48 | 2.0769958 | 0.8701172 | | B (4-5) | 0.16 | 0.15 | 0.22 | 0.6599121 | 0.5300293 | | A (5-6) | 1.97 | 0.21 | 1.98 | 4.2009890 | 0.9804687 | | B (5-6) | 0.20 | 0.19 | 0.27 | 0.8798828 | 0.6479502 | | A (6-7) | 1.62 | 0.17 | 1.63 | 3.0959778 | 0.9199219 | | B (6-7) | 0.19 | 0.16 | 0.25 | 0.6880035 | 0.6389770 | | A (7-8) | 1.14 | 0.13 | 1.15 | 1.7539978 | 0.7353958 | | B (7-8) | 0.07 | 0.13 | 0.14 | 0.4942016 | 0.6752014 | | A (8-1) | 1.19 | 0.15 | 1.20 | 1.9709778 | 0.7695312 | | B (8-1) | 0.08 | 0.14 | 0.16 | 0.5745430 | 0.6852951 |
|
Table 2. Projection error of methods A and B
| Scene | Method | Time-consuming /s |
|---|
| Cameras 1-2 | Cameras 2-3 | Cameras 3-4 | Cameras 4-5 | Cameras 5-6 | Cameras 6-7 | Cameras 7-8 |
|---|
| Ⅰ | SIFT | 2.8327 | 3.2834 | 2.7098 | 3.2543 | 2.8534 | 3.1927 | 3.2734 | | OpenCV | 0.5060 | 0.5109 | 0.5874 | 0.5647 | 0.5459 | 0.5774 | 0.5521 | | Ours | 0.0538 | 0.0534 | 0.0572 | 0.0528 | 0.0532 | 0.0528 | 0.0542 | | Ⅱ | SIFT | 4.0127 | 4.5892 | 4.2384 | 4.2384 | 4.9203 | 4.1294 | 4.3038 | | OpenCV | 0.7829 | 0.7968 | 0.7375 | 0.7283 | 0.7736 | 0.7205 | 0.7710 | | Ours | 0.0593 | 0.0588 | 0.0541 | 0.0567 | 0.0502 | 0.0564 | 0.0512 |
|
Table 3. Comparison of image mosaic efficiency