
Shiyu Lin, Xuejiao Yan, Zhe Xie, Hongwen Fu, Song Jiang, Hongzhi Jiang, Xudong Li, Huijie Zhao. Obstacle Detection for a Pipeline Point Cloud Based on Time Series and Neighborhood Analysis[J]. Laser & Optoelectronics Progress, 2022, 59(22): 2210007
- Laser & Optoelectronics Progress
- Vol. 59, Issue 22, 2210007 (2022)
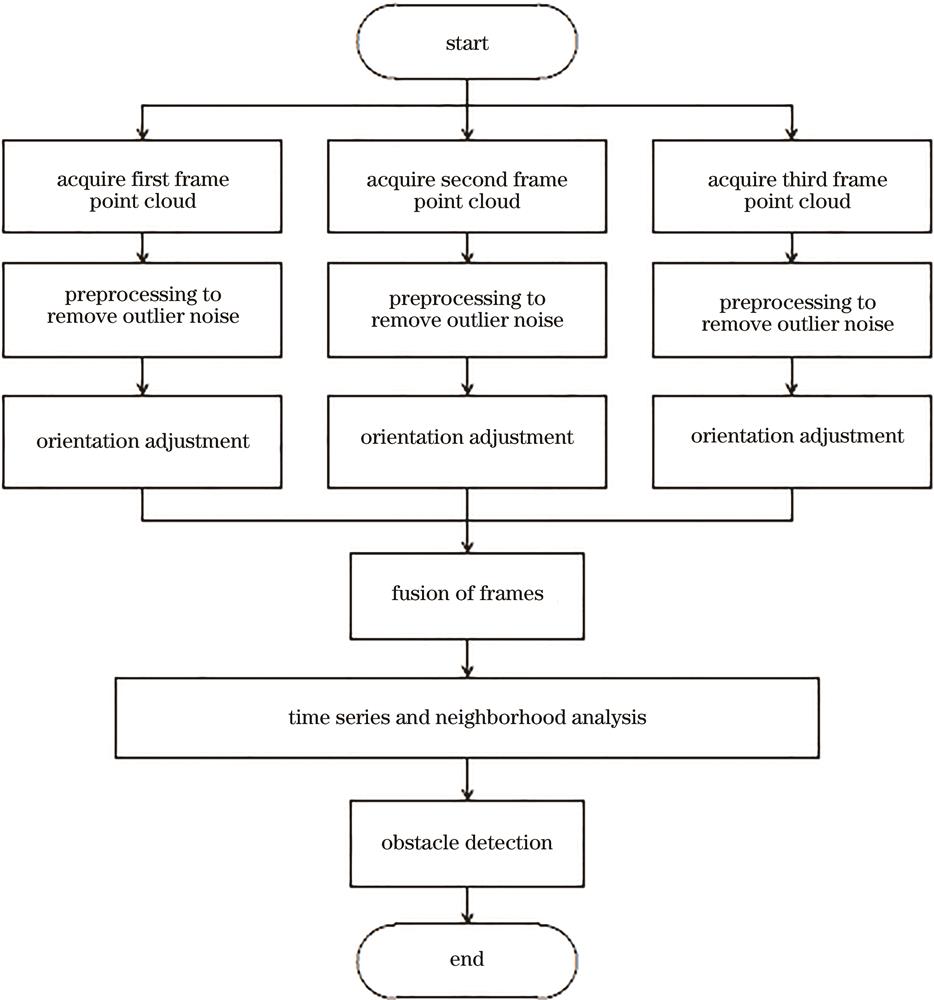
Fig. 1. Flow chart of obstacle detection
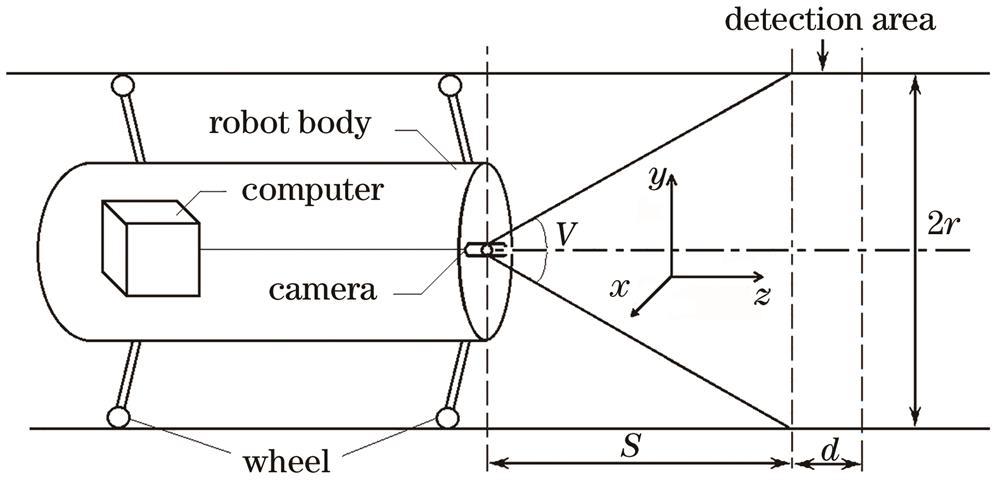
Fig. 2. Schematic diagram of detection area
Fig. 3. Schematic diagram of denoising based on time series and neighborhood analysis
Fig. 4. Filtering effect diagrams when n taking different values. (a) Original images; (b) n=2; (c) n=1; (d) n=0; (e) n=-1
Fig. 5. Pipeline physical map and point cloud map. (a) Pipeline physical map; (b) point cloud map
Fig. 6. Point cloud after preprocess and point cloud after orientation adjustment. (a) Single frame point cloud after preprocessing (50907 points); (b) point cloud after fusing 5 frames (255784 points)
Fig. 7. Comparison of point cloud distribution before and after denoising. (a) Distance distribution from point to axis before denoising; (b) distance distribution from point to axis after denoising
Fig. 8. Images of different filtering methods. (a) Original images; (b) image processed by Gaussian filtering; (c) image processed by proposed algorithm
|
Table 1. Noise comparison table before and after denoising
|
Table 2. Result of pipeline obstacle detection

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20