
Wen Hao, Hongxiao Wang, Yang Wang. Semantic Segmentation of Three-Dimensional Point Cloud Based on Spatial Attention and Shape Feature[J]. Laser & Optoelectronics Progress, 2022, 59(8): 0828004
- Laser & Optoelectronics Progress
- Vol. 59, Issue 8, 0828004 (2022)
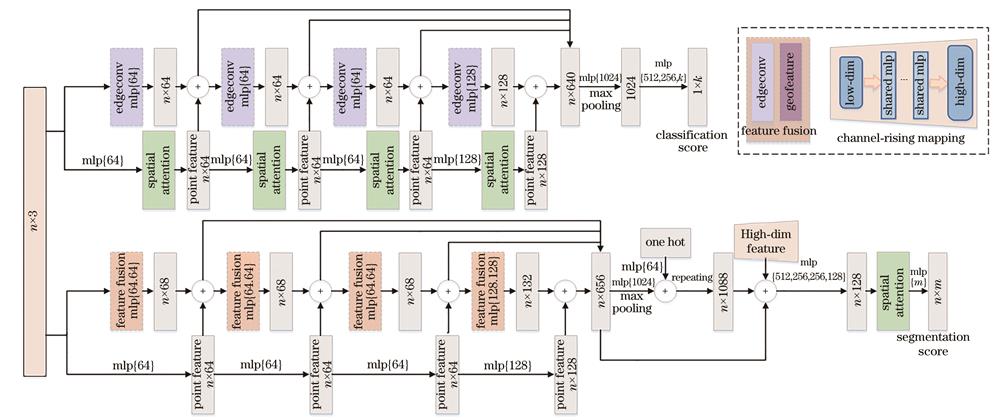
Fig. 1. AMFF-DGCNN structure
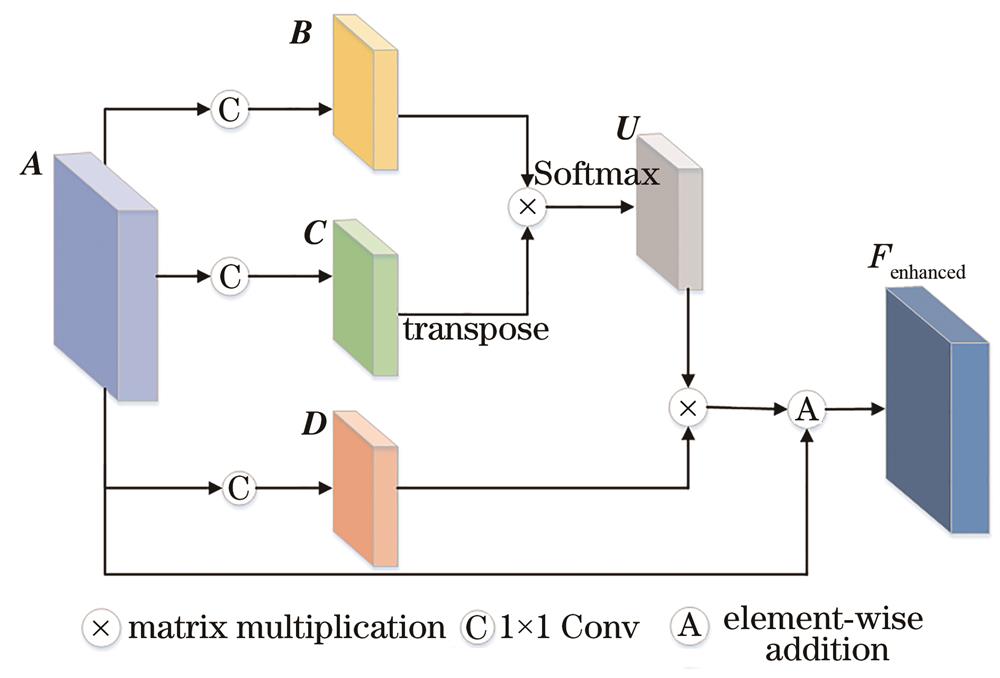
Fig. 2. Spatial attention module
Fig. 3. Component segmentation effects of DGCNN,AMFF-DGCNN on ShapeNet dataset. (a) Ground truth; (b) DGCNN;(c) AMFF-DGCNN
Fig. 4. Semantic segmentation results of DGCNN, AMFF-DGCNN on S3DIS dataset. (a) Input point cloud; (b) ground truth; (c) DGCNN segmentation results; (d) AMFF-DGCNN segmentation results
|
Table 1. Comparison of classification experimental results on ModelNet40 dataset
|
Table 2. Comparison of experimental results of component segmentation on ShapeNet dataset
|
Table 3. Semantic segmentation results of Area 5 on S3DIS dataset
|
Table 4. Semantic segmentation results of 6-fold cross-validation on S3DIS dataset
|
Table 5. Module importance analysis

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20