
Kaiyi Zhang, Ru Hong, Shaoyan Gai, Feipeng Da. Three-Dimensional Human Hand Pose Estimation Based on Finger-Point Reinforcement and Multi-Level Feature Fusion[J]. Acta Optica Sinica, 2022, 42(19): 1915001
- Acta Optica Sinica
- Vol. 42, Issue 19, 1915001 (2022)
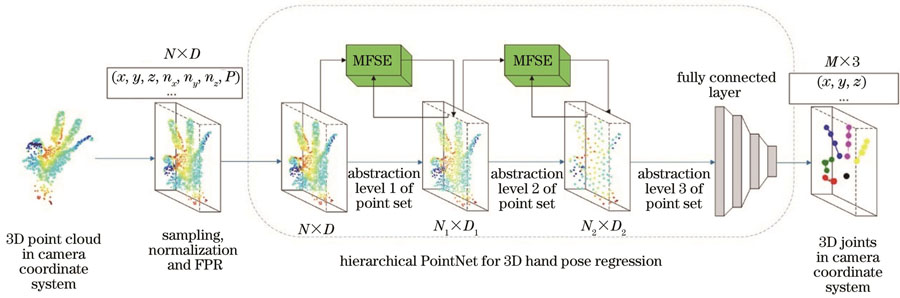
Fig. 1. Overview of overall algorithm flow

Fig. 2. Comparison of three groups of gestures (black dots on top are parts with higher confidence parameters, and original point clouds are shown on bottom)
Fig. 3. SE module and MFSE module. (a) SE module; (b) MFSE module
Fig. 4. Error of each finger joint point by different methods
Fig. 5. Proportion of test frames with errors within different thresholds
Fig. 6. Comparison of experimental results under ICVL dataset
Fig. 7. Comparison of experimental results under MSRA dataset
|
Table 1. Error distance of each joint of FPR strategy on MSRA dataset
|
Table 2. Error distance of each joint on MSRA dataset by different methods
|
Table 3. Average error distance of each method on MSRA and ICVL datasets

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20