
Le Huang, Gongping Wu, Xuhui Ye. Obstacle Identification Under Low-Light Conditions of Transmission Line Inspection Robot[J]. Acta Optica Sinica, 2018, 38(9): 0915006
- Acta Optica Sinica
- Vol. 38, Issue 9, 0915006 (2018)
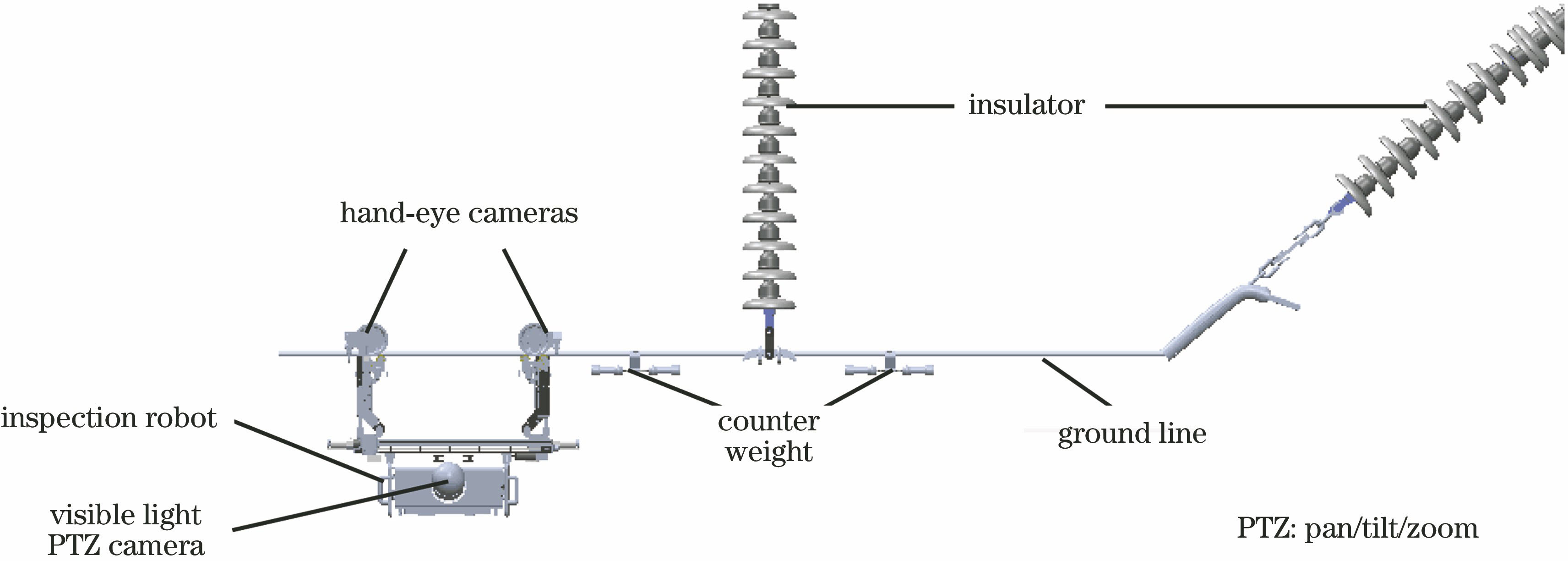
Fig. 1. Structure of a high voltage transmission line
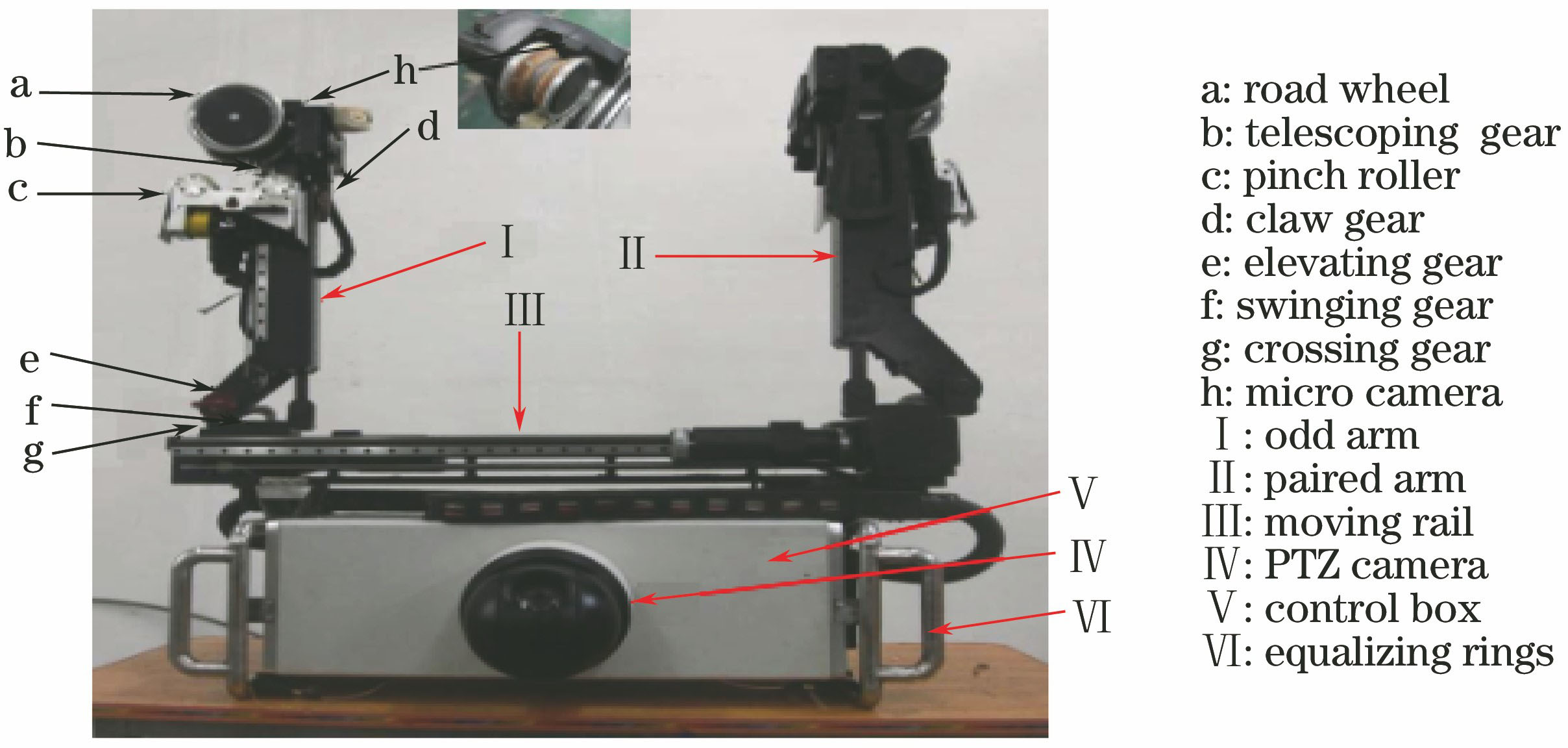
Fig. 2. Inspection robot
Fig. 3. Flow chat of barriers identification
Fig. 4. Homomorphic filtering process
Fig. 5. Homomorphic filter function
Fig. 6. Comparison of images before and after image filtering. (a) Before filtering; (b) after filtering
Fig. 7. Kirsch eight direction templates
Fig. 8. LDP coding process
Fig. 9. CLDP coding process
Fig. 10. Comparison of LDP and CLDP algorithms feature extraction
Fig. 11. Histogram extraction of obstacles image CLDP
Fig. 12. Part of the obstacle image sample. (a) Suspension clamp; (b) count weight; (c) insulator chain
Fig. 13. AH-CLDP recognition rate at different fixed values of c
Fig. 14. Recognition rate under different sample sizes. (a) Count weight; (b) suspension clamp; (c) insulator chain
|
Table 1. Data of recognition accuracy%
|
Table 2. Contrast of the recognition performance

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20