
Haihua Cui, Tao Jiang, Kunpeng Du, Ronghui Guo, An′an Zhao. 3D Imaging Method for Multi-View Structured Light Measurement Via Deep Learning Pose Estimation[J]. Acta Optica Sinica, 2021, 41(17): 1712001
- Acta Optica Sinica
- Vol. 41, Issue 17, 1712001 (2021)
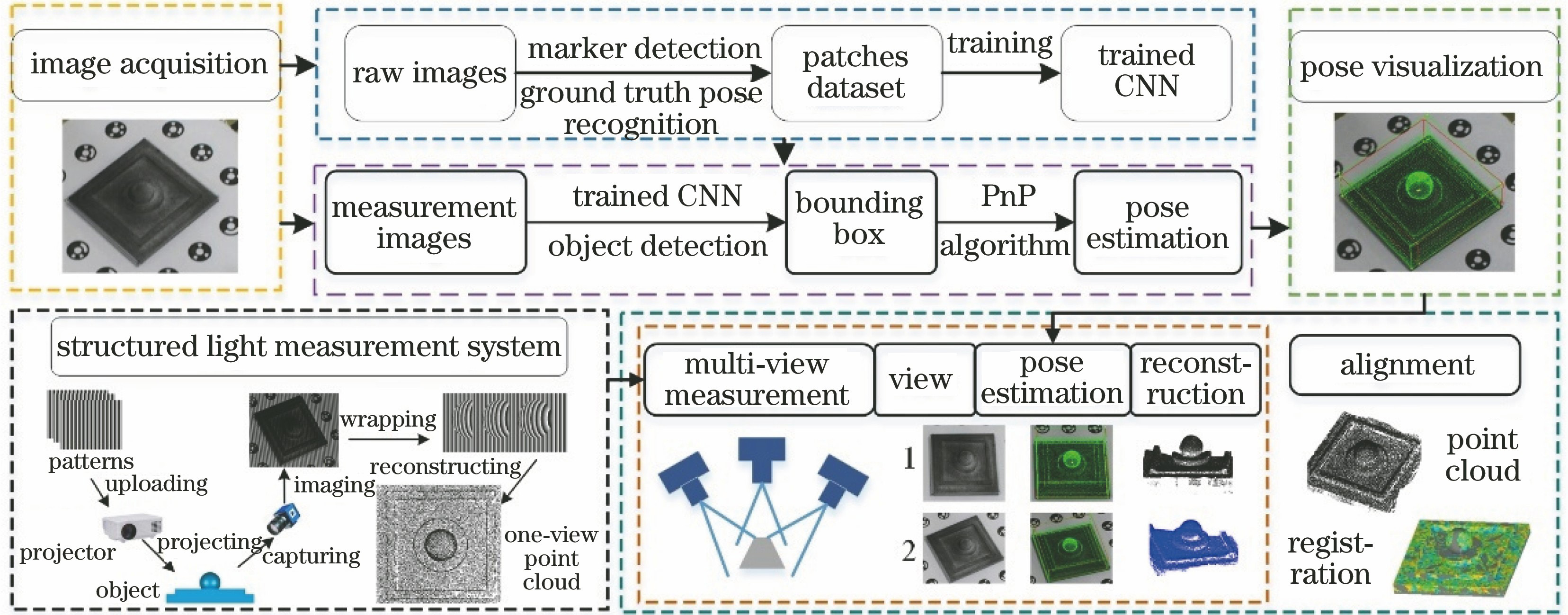
Fig. 1. Proposed data alignment strategy for multi-view structured light measurement
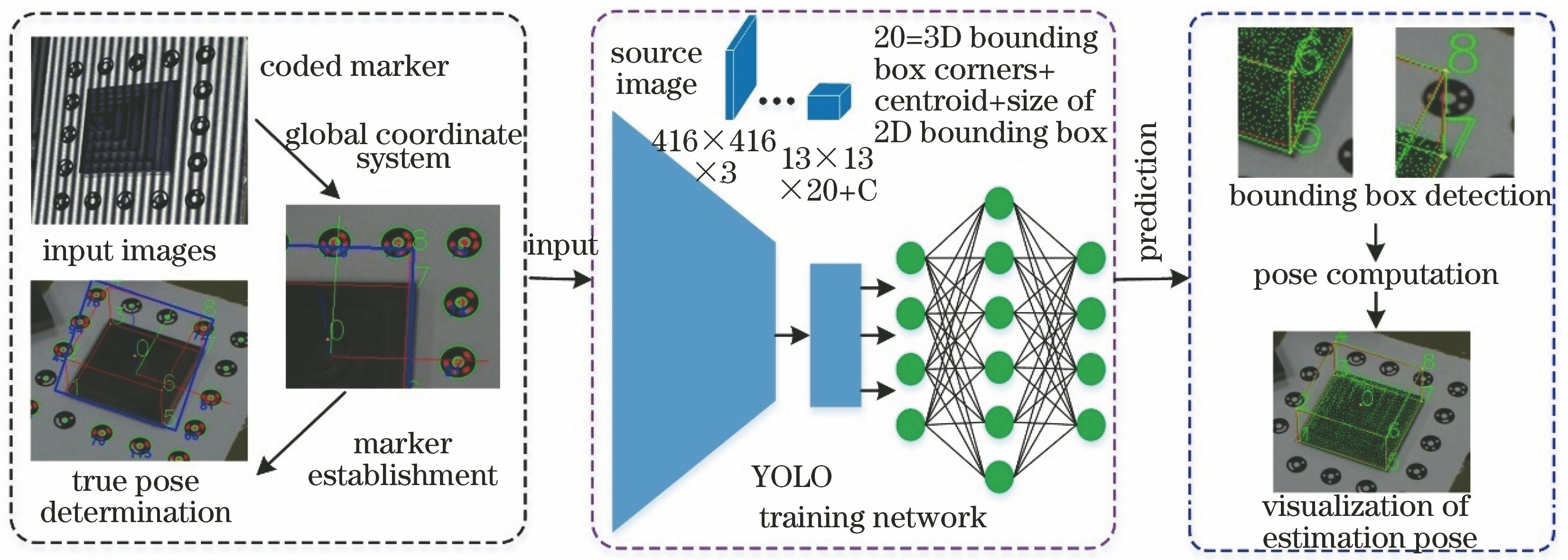
Fig. 2. Pose estimation based on YOLO network
Fig. 3. Experimental results. (a) Setup; (b) training loss and testing accuracy; (c) translation and rotation error; (d) true pose determination; (e) pose estimation visualization
Fig. 4. More cases presentation of object pose estimation. (a) Sphere; (b) pyramid; (c) pillars; (d) elbow
Fig. 5. Single-view structured light reconstruction based on the proposed system. (a) Projection image; (b) wrapping phase; (c) absolute phase; (d) 3D point cloud
Fig. 6. Point cloud splicing using estimated pose. (a)(d) Projection images in two views; (b)(e) pose estimation results; (c)(f) point clouds in two views; (g) data splicing result; (h) zoom-in view of box in Fig. (g)
Fig. 7. Data registration with estimated pose. (a)(d)Two-view registration of pillars and recess, with deep learning-based pose estimation; (b)(e) global refinement using ICP algorithm based on rough rigid transformation; (c)(f) error distributions of the final registration of fused data in Figs. (b), (e) and CAD model, where the error is determined by the point-to-model distance
|
Table 1. Error computation of pose estimation
|
Table 2. Error comparison of data fusion using markers and deep learning

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20