
Lili Yu, Haiyang Yu, Zixin He, Liangxuan Chen. Point Cloud Scene Segmentation Based on Dual Attention Mechanism and Multi-Scale Features[J]. Laser & Optoelectronics Progress, 2021, 58(24): 2428007
- Laser & Optoelectronics Progress
- Vol. 58, Issue 24, 2428007 (2021)

Fig. 1. Convolution network structure after embedding attention mechanism
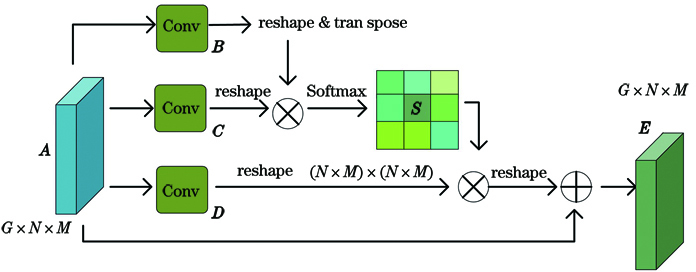
Fig. 2. Spatial attention mechanism module
Fig. 3. Channel attention mechanism
Fig. 4. Segmentation network structure with embedded attention mechanism
Fig. 5. Multi-scale data fusion
Fig. 6. Experimental data set. (a) Training data set; (b) image corresponding to training data set; (c) test data set; (d) image corresponding to test data set
Fig. 7. Visualization of test set splitting effect
Fig. 8. Comparison chart of misclassification results. (a) Attention mechanism not embedded; (b) embedded attention mechanism
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Comparison of proposed algorithm and results provided by ISPR network
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. Comparison of proposed algorithm and deep learning algorithms
|
Table 3. IoU of each category on Vaihingen unit: %

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20