
Meng Yuan, Aihua Li, Yong Zheng, Zhigao Cui, Zhengqiang Bao. Point-Line Feature Fusion in Monocular Visual Odometry[J]. Laser & Optoelectronics Progress, 2018, 55(2): 021501
- Laser & Optoelectronics Progress
- Vol. 55, Issue 2, 021501 (2018)
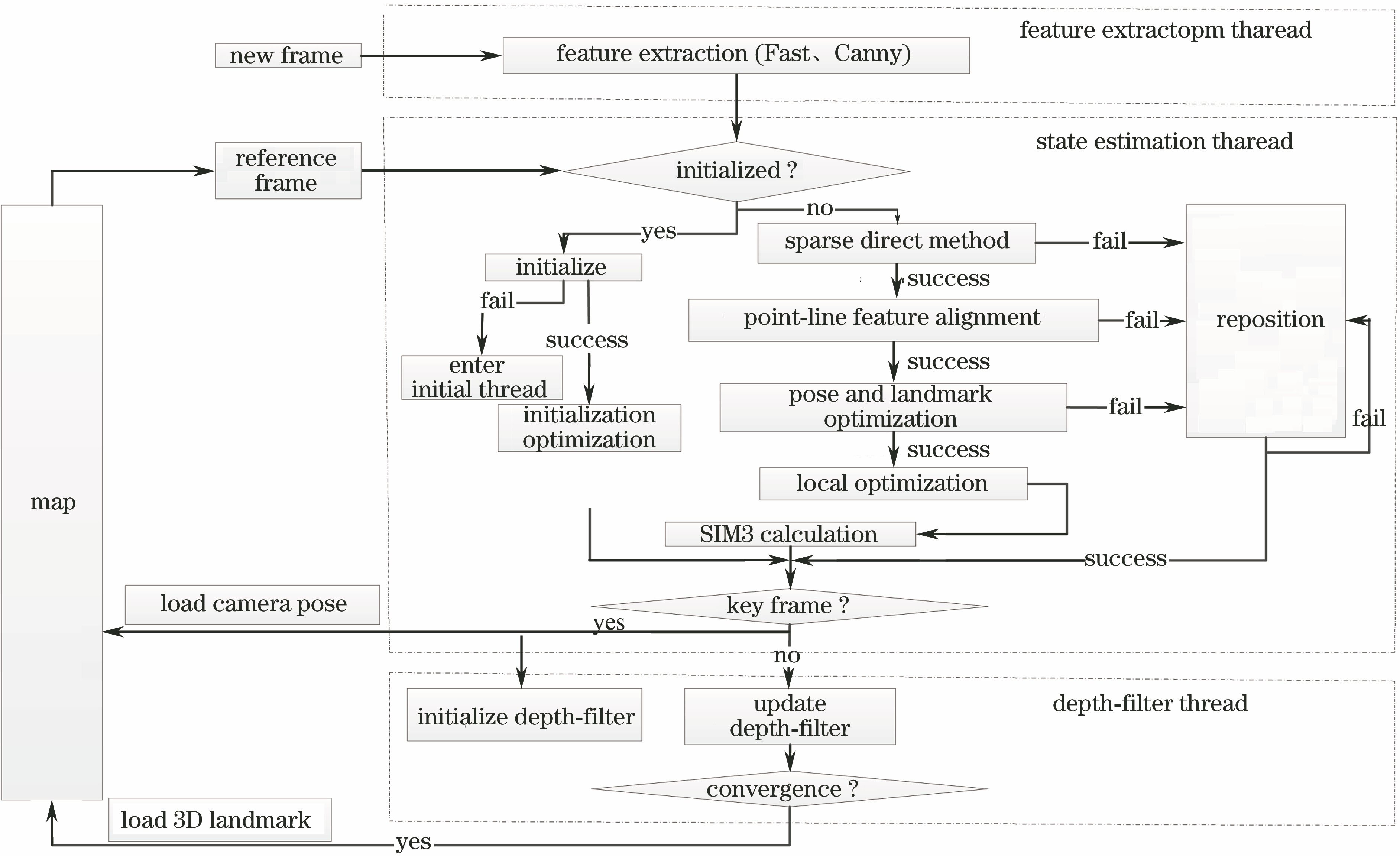
Fig. 1. Flowchart of monocular visual odometry

Fig. 2. Feature extraction of points (green) and lines (red) in Tum dataset
Fig. 3. Schematic of error analysis for different initialization models
Fig. 4. Schematic of depth filter
Fig. 5. Real-time operation effects in part of the Euroc datasets. (a) MH_01 dataset; (b) MH_02 dataset
Fig. 6. Location effect in partial Euroc datasets. (a) MH_01 dataset; (b) MH_02 dataset
Fig. 7. Real-time operation effects in part of the Tum datasets. (a) fr2_desk dataset; (b) fr2_xyz dataset
Fig. 8. Location effects in partial Euroc datasets. (a) fr2_desk dataset; (b) fr2_xyz dataset
Fig. 9. Physical map of robot platform
Fig. 10. Running effects of actual robot. (a) Indoor scene; (b) corridor scene
|
Table 1. Comparison of correction performance for point-line features
|
Table 2. Comparison of depth estimation performance for point-line features
| |||||||||||||||||||||||||||
Table 3. Error comparison experiment in Euroc dataset
| ||||||||||||||||||||
Table 4. Error comparison experiment in Tum dataset

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20