
Xiuhua Zhang, Hanyu Hong, Yangyang Xu, Tianxu Zhang. Real time 3D vision screening method of ore under complex lighting conditions[J]. Infrared and Laser Engineering, 2021, 50(11): 20210125
- Infrared and Laser Engineering
- Vol. 50, Issue 11, 20210125 (2021)
Fig. 1. Ore transportation image on site
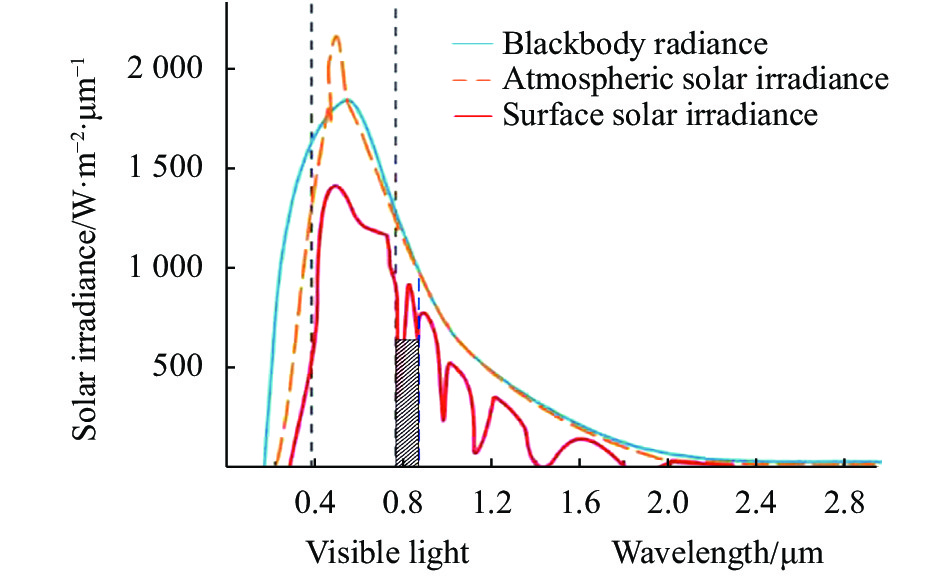
Fig. 2. Spectral intensity of solar radiation
Fig. 3. Schematic diagram of infrared structured light ore image acquisition system
Fig. 4. Ore images of visible and infrared structured light under different illumination conditions. (a) Green line laser (no direct sunlight); (b) Infrared laser (no direct sunlight); (c) Green line laser (strong light); (d) Infrared laser (strong light)
Fig. 5. Ideal gray distribution of line structured light cross section. (a) Ideal Gaussian distribution; (b) Flattened Gaussian distribution
Fig. 6. Gray distribution of visible and infrared structure cross section under different light environment. (a) Green line laser (no direct sunlight); (b) Infrared laser (no direct sunlight); (c) Green line laser (strong light); (d) Infrared laser (strong light)
Fig. 7. Schematic diagram of sliding differential template. (a) Backward; (b) Forward
Fig. 8. Forward cumulative difference
Fig. 9. Measurement of gauge block. (a) Schematic diagram of gauge block projection line; (b) Schematic diagram of height formation
Fig. 10. Extraction result of different method. (a) Gauss method; (b) Steger method; (c) Proposed method
Fig. 11. Results of local center line deviation. (a) Gauss method; (b) Steger method; (c) Proposed method
Fig. 12. Endpoint centerline bifurcation by Steger method
Fig. 13. Enlarged result in the yellow box in Fig.12 . (a) Box A; (b) Box B; (c) Box C; (d) Box D
Fig. 14. 3D point cloud display and screening results of ore
|
Table 1. Coordinates of the center point with different values of m (Unit: pixel)
|
Table 2. Height measurement results of the gauge block with proposed method (Unit: mm)
|
Table 3. Comparison of off-line structured light centerline extraction results
|
Table 4. Comprehensive comparison of online ore screening methods

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20