
Yang Xue, Wei Chen, Shuang Wang, Zhenqiang Yin, Lei Shi, Zhengfu Han. Airborne quantum key distribution: a review [Invited][J]. Chinese Optics Letters, 2021, 19(12): 122702
- Chinese Optics Letters
- Vol. 19, Issue 12, 122702 (2021)
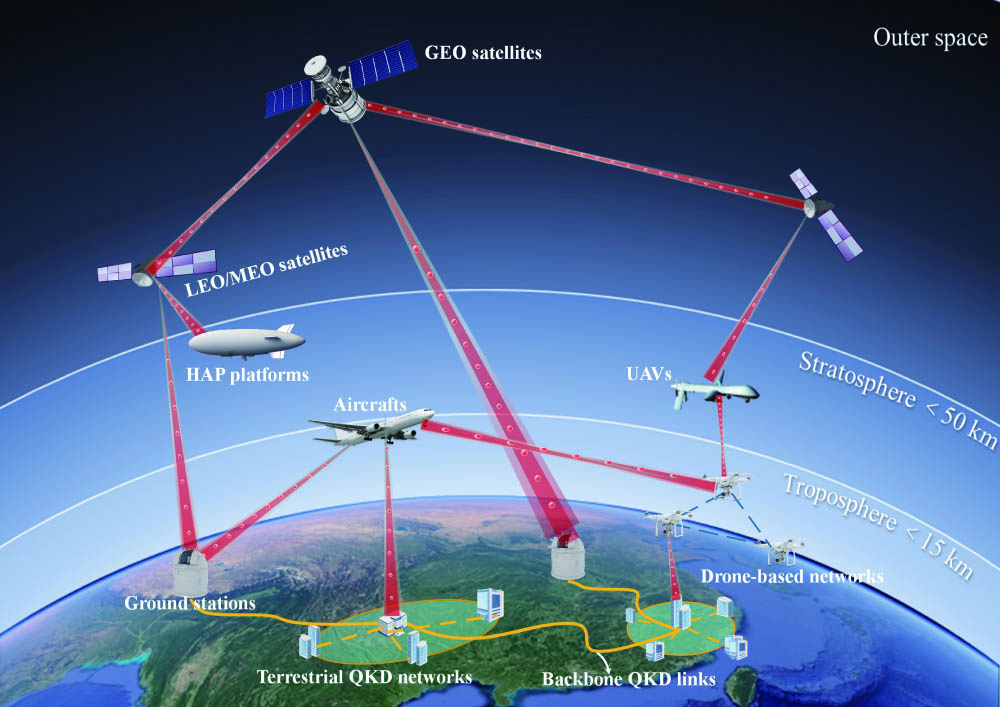
Fig. 1. Hierarchical quantum network operating in different atmospheric layers. LEO, low Earth orbit; MEO, medium Earth orbit; GEO, geostationary Earth orbit; HAP platform, high-altitude platform; UAV, unmanned aerial vehicle.
![Recent progress in airborne quantum communications. In clockwise order, the first downlink QKD demonstration in 2013 using the hot-air balloon by Wang et al.[46], the basis detection and compensation experiment in 2014 using the Z-9 helicopter by Zhang et al. from the Chinese Academy of Sciences[50], the first uplink QKD demonstration in 2017 using the Twin Otter research aircraft by Pugh et al. from the University of Waterloo[45], the first drone-based entanglement distribution in 2020 using UAV by Liu et al. from the Nanjing University[48,49], the drone-based QKD test in 2017 using DJI S1000+ octocopter by Hill et al. from the University of Illinois[5153" target="_self" style="display: inline;">–53], the free-space QKD in 2015 based on a moving pick-up truck by Bourgoin et al. from the University of Waterloo[54], and the first air-to-ground QKD demonstration in 2013 using the Dornier-228 aircraft by Nauerth et al. from the Ludwig-Maximilians University[44].](/richHtml/col/2021/19/12/122702/img_002.jpg)
Fig. 2. Recent progress in airborne quantum communications. In clockwise order, the first downlink QKD demonstration in 2013 using the hot-air balloon by Wang et al.[46], the basis detection and compensation experiment in 2014 using the Z-9 helicopter by Zhang et al. from the Chinese Academy of Sciences[50], the first uplink QKD demonstration in 2017 using the Twin Otter research aircraft by Pugh et al. from the University of Waterloo[45], the first drone-based entanglement distribution in 2020 using UAV by Liu et al. from the Nanjing University[48,49], the drone-based QKD test in 2017 using DJI S1000+ octocopter by Hill et al. from the University of Illinois[5153" target="_self" style="display: inline;">–53 ], the free-space QKD in 2015 based on a moving pick-up truck by Bourgoin et al. from the University of Waterloo[54], and the first air-to-ground QKD demonstration in 2013 using the Dornier-228 aircraft by Nauerth et al. from the Ludwig-Maximilians University[44].
Fig. 3. Block diagrams of airborne QKD system. QRNG, quantum random number generator; Mod, modulator; Aux, auxiliary devices; TDC, time-to-digital converter; ATP, acquisition, tracking, and pointing; FSM, fast-steering mirror; PSD, position-sensitive detector; C, coupler; M, mirror; SPD, single-photon detector.
Fig. 4. Link configurations for airborne QKD.
Fig. 5. Secure key rates with different PER.
Fig. 6. Quantum source and transmitter in the ground-to-air QKD demonstration[45].
Fig. 7. ATP system in the drone-based entanglement distribution experiment[48].
Fig. 8. Schematic diagrams of time synchronization precision.
|
Table 1. List of Recent Airborne Quantum Communication Experiments and Related Projects
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. ATP Performance of the Typical Airborne Quantum Communication Experiments

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20