Author Affiliations
1College of Information, Heilongjiang Agricultural Engineering Vocational College, Harbin 150088, China2Chang Guang Satellite Technology CO., LTD, Changchun 130102, China3College of Mechanical and Electrical Engineering, Heilongjiang Institute of Technology, Harbin 150050, China4College of Information and Communication Engineering, Harbin Engineering University, Harbin 150001, China5College of Shipbuilding Engineering, Harbin Engineering University, Harbin 150001, Chinashow less
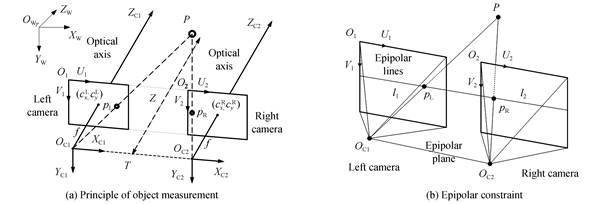
Fig. 1. Measurement principle of binocular stereo camera
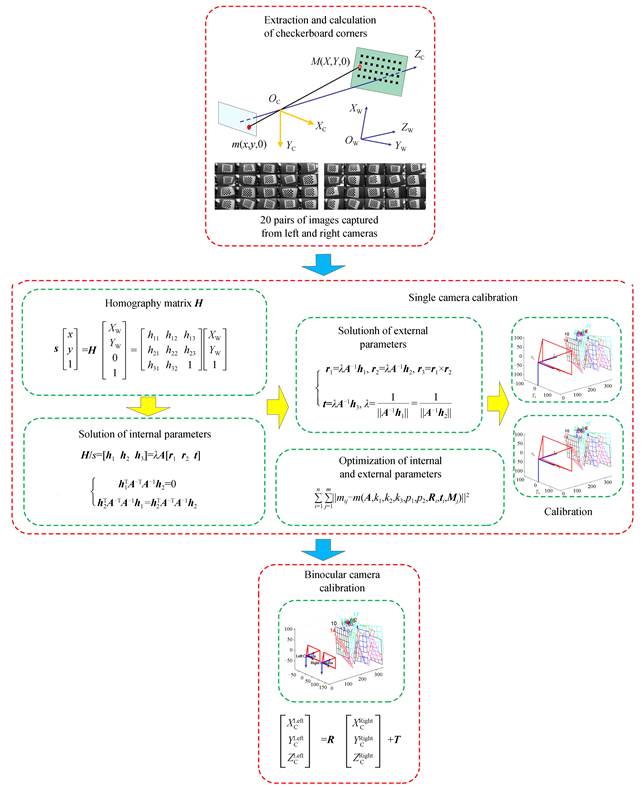
Fig. 2. Calibration principle and method of binocular camera
Fig. 3. Visual measurement method of thin-walled parts deformation
Fig. 4. Image recognition of world coordinate system
Fig. 5. Visual detection and location of coded targets
Fig. 6. Detection and location of circular markers
Fig. 7. Geometric parameters of the ellipse in image coordinate
Fig. 8. Decoding of coded ring
Fig. 9. Calculation of effective edge contour
Fig. 10. Extract and stereo matching of feature points
Fig. 11. Binocular stereo vision measurement system
Fig. 12. Deformation measurement and 3D reconstruction results
Fig. 13. Comparison experiment of deformation detection algorithm
| Parameter name | Left camera | Right camera | | Focal length\begin{document}$ \left[ {\begin{array}{*{20}{c}}
{{f_x}}&{{f_y}}
\end{array}} \right] $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{2{\rm{}}782.587{\rm{}}53}&{2{\rm{}}783.1624{\rm{}}6}
\end{array}} \right] $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{2{\rm{}}800.191{\rm{}}10}&{2{\rm{}}800.325{\rm{}}49}
\end{array}} \right] $\end{document} | | Principal point\begin{document}$ \left( {{c_x}, {c_y}} \right) $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{1{\rm{}}280.448{\rm{}}59}&{1{\rm{}}065.989{\rm{}}82}
\end{array}} \right] $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{1{\rm{}}294.715{\rm{}}44}&{959.4011{\rm{}}6}
\end{array}} \right] $\end{document} | | Distortion \begin{document}$ \boldsymbol k $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{ - 0.439{\rm{}}99}&{0.261{\rm{}}59}&{ - 0.001{\rm{}}29}&{0.000{\rm{}}53}
\end{array}} \right] $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{ - 0.446{\rm{}}43}&{0.281{\rm{}}04}&{ - 0.000{\rm{}}13}&{ - 0.000{\rm{}}60}
\end{array}} \right] $\end{document} | | Rotation matrix \begin{document}$ \boldsymbol R $\end{document} | \begin{document}$ \left[ {\begin{array}{*{20}{c}}
{0.997{\rm{}}415}&{0.005{\rm{}}354}&{0.071{\rm{}}661}\\
{0.006{\rm{}}715}&{0.999{\rm{}}801}&{ - 0.018{\rm{}}776}\\
{ - 0.071{\rm{}}547}&{0.019{\rm{}}209}&{0.997{\rm{}}252}
\end{array}} \right] $\end{document} | | Translation matrix \begin{document}$ \boldsymbol T $\end{document} | \begin{document}$ {\left[ {\begin{array}{*{20}{c}}
{ - 78.124{\rm{}}89}&{ - 1.756{\rm{}}76}&{4.487{\rm{}}58}
\end{array}} \right]^{\rm{T}}} $\end{document} |
|
Table 1. Calibration results of binocular camera
| Measured object | True value/mm | Measured value/mm | Error/% | | \begin{document}$ {L_{AB}} $\end{document} | 16 | 16.043 | 0.268 8 | | \begin{document}$ {L_{AC}} $\end{document} | 16 | 16.037 | 0.231 2 | | \begin{document}$ {L_{AD}} $\end{document} | 22.627 | 16.054 | 0.238 7 | | Circle edge feature | í | í | 0.542 6 | | Rectangle edge feature | í | í | 0.771 3 | | Cross edge feature | í | í | 0.827 9 |
|
Table 2. Measurement results of high-precision target