
Mengbing Xu, Youmei Han, Liuzhao Wang, Panke Zhang, Dongming Liu, Jinghua Yang. Research on High-precision Manhole Cover Extraction and Settlement Disease Detection Method Based on Laser Point Cloud[J]. Chinese Journal of Lasers, 2021, 48(16): 1604001
- Chinese Journal of Lasers
- Vol. 48, Issue 16, 1604001 (2021)
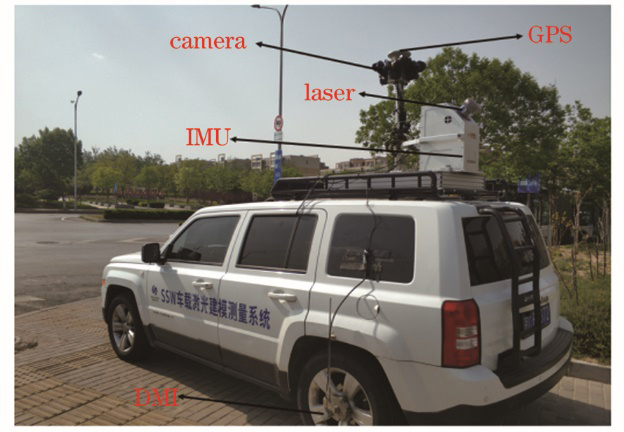
Fig. 1. Overall structure of SSW vehicle-borne laser modeling system
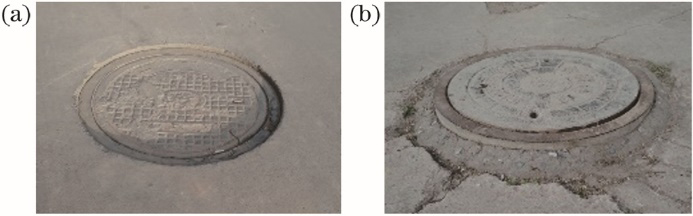
Fig. 2. Common manhole cover disease problems.(a) Manhole cover sinking; (b) manhole cover raised
Fig. 3. Flow chart of rapid identification and location of manhole cover and disease detection technology
Fig. 4. Schematic diagram of two-point tilt diagram
Fig. 5. Principle diagram of CSF algorithm
Fig. 6. Image binarization results of global threshold and adaptive threshold. (a) Sample image 1; (b) sample image 2
Fig. 7. Frame diagram of precise extraction of manhole cover
Fig. 8. Schematic diagram of edge curvature. (a) Round edge contour of manhole cover; (b) arc differential; (c) curvature
Fig. 9. Manhole cover extraction and marking
Fig. 10. Rigel laser scanner
Fig. 11. Experimental point cloud data. (a) Experimental data point cloud roadmap; (b) coloring map of pavement point cloud intensity
Fig. 12. Combined ground filtering. (a) Ground points; (b) non-ground points; (c) combination of ground points and non-ground points
Fig. 13. Automatic extraction of urban manhole covers based on vehicle-borne laser point cloud. (a) Original point cloud (real scene rendering); (b) ground points (intensity coloring); (c) intensity feature image; (d) manhole cover extraction result; (e) partial enlarged view
Fig. 14. Manhole cover extraction result. (a) Schematic diagram of manhole cover position 1; (b) schematic diagram of manhole cover position 2
|
Table 1. Technical indicators of Riegl laser scanner
|
Table 2. Accuracy verification of manhole cover center
|
Table 3. Comparison of manhole cover settlement values between SSW vehicle-borne system and DS3 level

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20