
Fajie Feng, Yazhou Ding, Junping Li, Xingbei Huang, Xinyi Liu. Airborne LiDAR point cloud filtering using saliency division[J]. Infrared and Laser Engineering, 2020, 49(8): 20190439
- Infrared and Laser Engineering
- Vol. 49, Issue 8, 20190439 (2020)
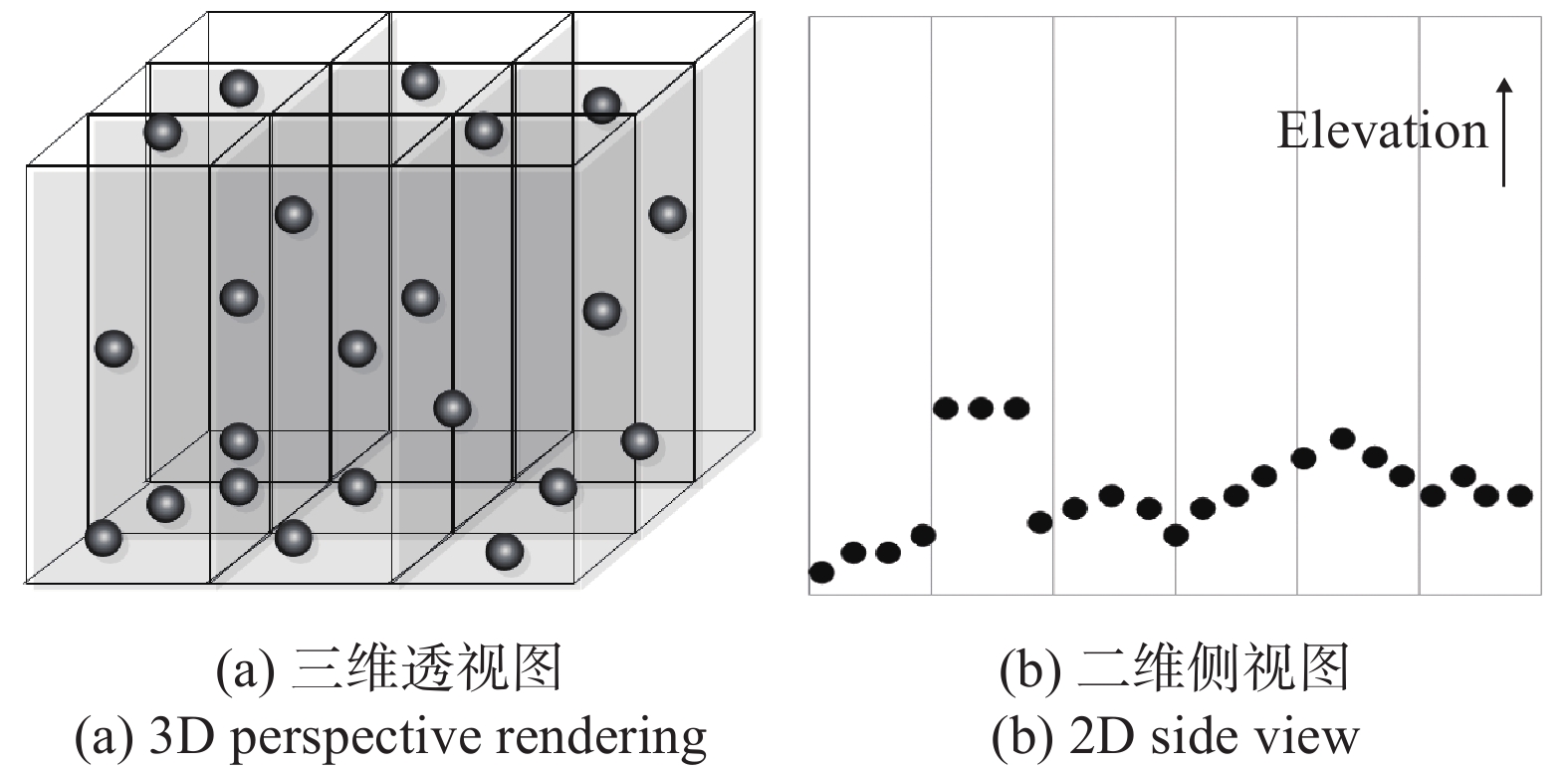
Fig. 1. Virtual grid
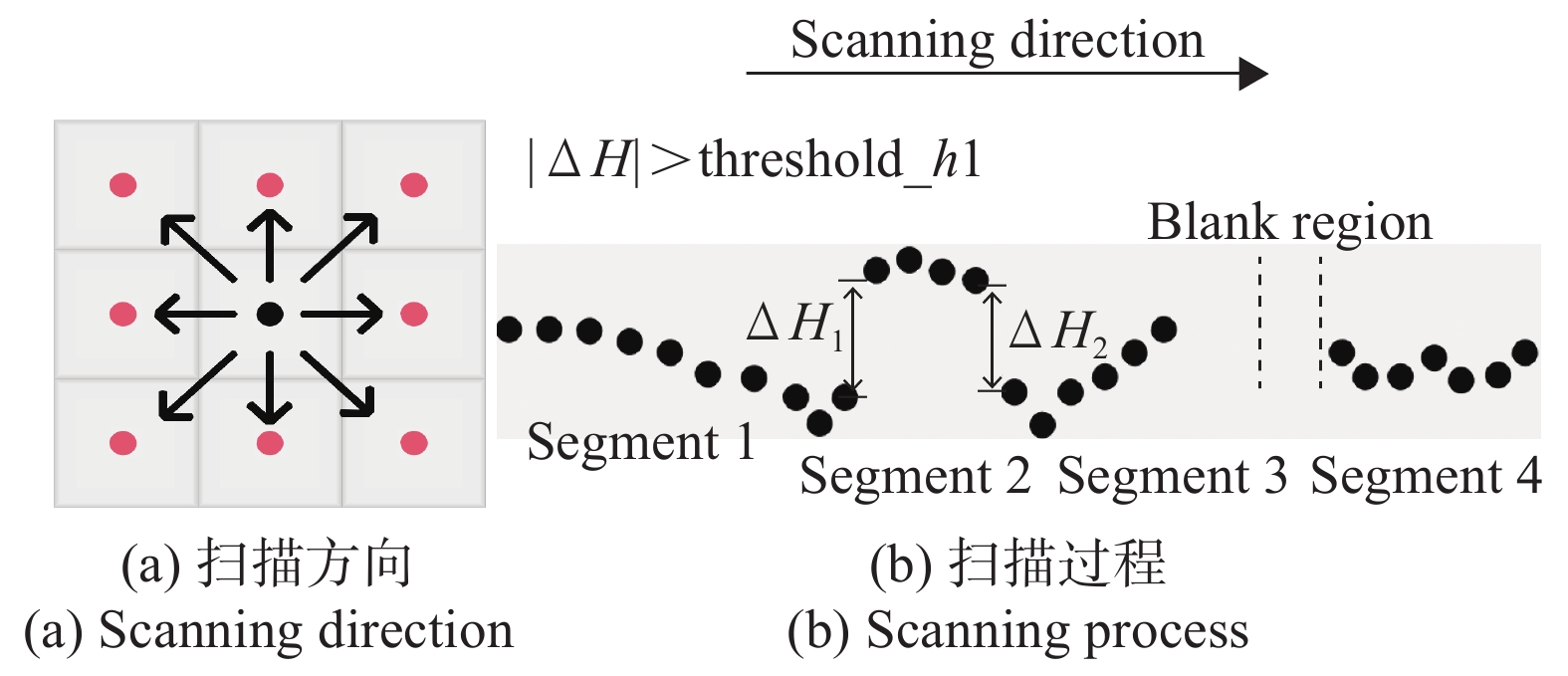
Fig. 2. Elevation mutations detection in multiple directions
Fig. 3. Ground saliency calculating
Fig. 4. Layered map of point cloud elevation(a) and gray rendering map of ground saliency(b)
Fig. 5. Roofs of special shape building
Fig. 6. Ground saliency distribution of center sunken buildings area
Fig. 7. Comparison of filtering result of site 1 and 9. (a) Filtering result of site 1; (b) original point clouds; (c) filtering result of site 9; (d) original point clouds
| ||||||||||||||||||||||||||||||||
Table 1.
Landform in each subarea
各子测区地形
| ||||||||||||||||||
Table 2.
Assessment criteria of crosstab method
交叉表法评价指标
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 3.
Error rate in different terrains using different threshold γ(%)
在不同区域使用不同γ阈值的错误率(%)
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 4.
Comparison and analysis of filtering accuracy
滤波精度对比分析

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20