
Yifeng Lu, Qinhua Jin, Jing Jing, Yundai Chen, Yihui Cao, Jianan Li, Rui Zhu. Detection and Segmentation Algorithm for Bioresorbable Vascular Scaffolds Struts Based on Machine Learning[J]. Acta Optica Sinica, 2018, 38(2): 0215005
- Acta Optica Sinica
- Vol. 38, Issue 2, 0215005 (2018)

Fig. 1. Workflow of BVS strut malapposition analysis (Local enlarged drawing in the first image shows structure of one of the BVS struts)
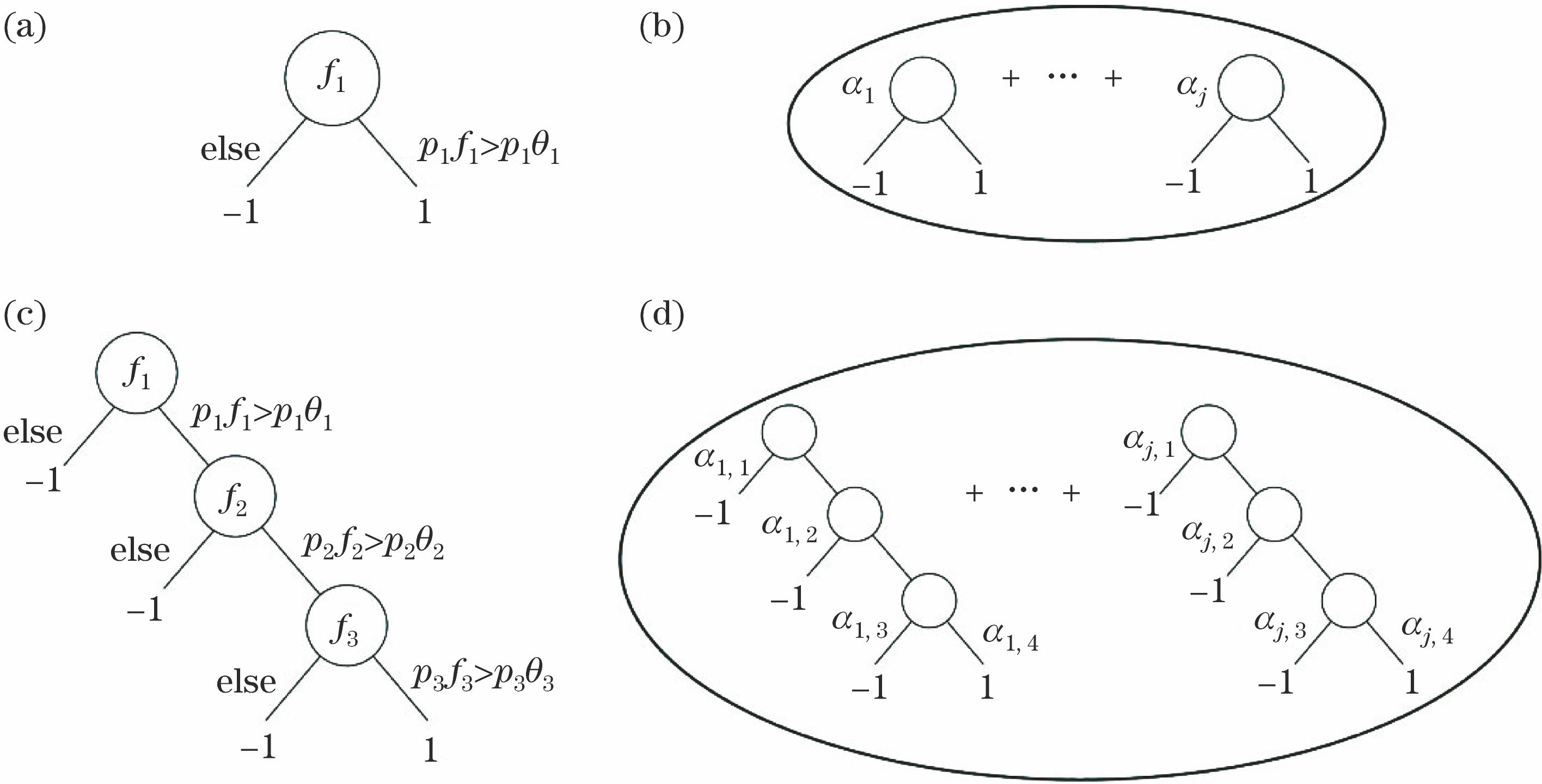
Fig. 2. (a) Single stump-based weak classifier; (b) strong classifier boosted by Fig. 2(a); (c) three-layer decision tree-based weak classifier; (d) strong classifier boosted by Fig. 2(c)
Fig. 3. Structure of cascaded classifier
Fig. 4. Workflow of detection. (a) Input image; (b) detection region; (c) diagram of sliding sub-window; (d) detection through cascaded classifier; (e) BVS candidates; (f) output image
Fig. 5. Procedure of strut segmentation. (a) Strut in Cartesian coordinate system; (b) strut in polar coordinate system; (c) segmented contour in polar coordinate system; (d) segmented contour transformed back into Cartesian coordinate system
Fig. 6. Results of strut malapposition analysis. (a) Normal IVOCT images; (b)(c) images with blood artifacts; (d)-(f) images with both apposed and malapposed struts (For malapposed struts, distances between strut and lumen are represented by white lines)
Fig. 7. (a) Error curve of training; (b) ROC curve of testing
| |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. Results of strut detection and segmentation

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20