
Jian Li, Kunpeng Wang, Kai Jin, Chen Xu, Hanchu Fu, Kai Wei. Inverse Synthetic Aperture Lidar Motion Compensation Imaging Algorithm for Maneuvering Targets[J]. Acta Optica Sinica, 2021, 41(19): 1928001
- Acta Optica Sinica
- Vol. 41, Issue 19, 1928001 (2021)
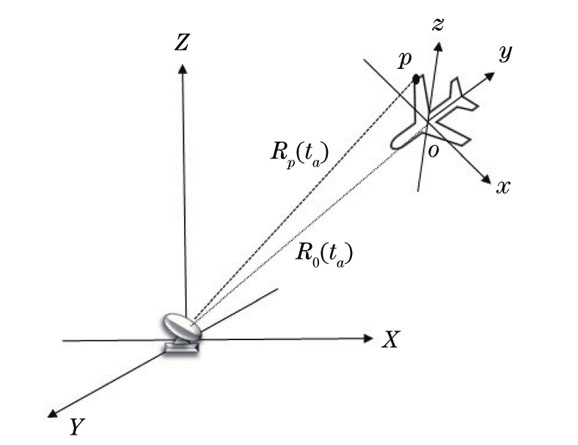
Fig. 1. Geometric model of the ISAL
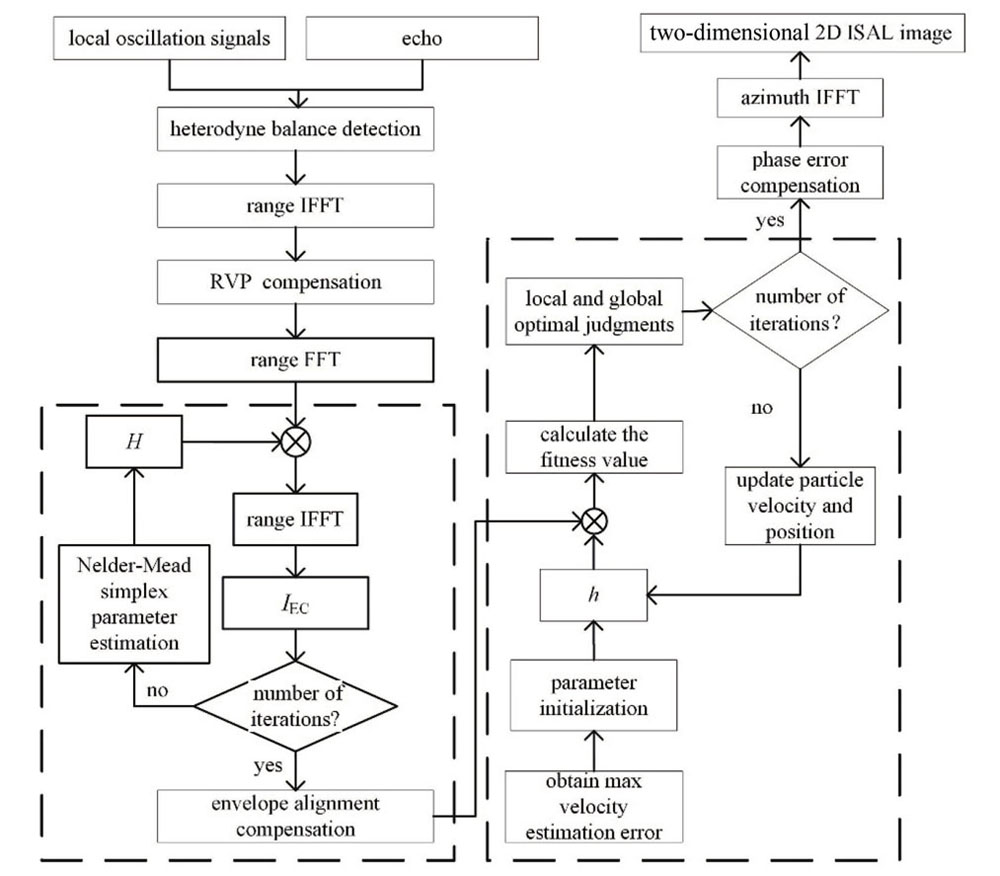
Fig. 2. Flow chart of the NM-PSO imaging algorithm
Fig. 3. Target model of the simulation experiment
Fig. 4. Distance image and two-dimensional imaging results obtained by different algorithms. (a) Uncompensation;(b) uncompensation-PSO; (c) cross-correlation method; (d) cross-correlation method and PSO; (e) NM simplex; (f) NM-PSO
Fig. 5. Velocity estimation error
Fig. 6. Parameter estimation results. (a) Parameter estimation error; (b) distribution of acceleration particles
Fig. 7. Two-dimensional imaging results and entropy distribution. (a) PGA algorithm;(b) NM simplex method; (c) PSO algorithm
Fig. 8. Experimental results of shot noise. (a) IE; (b) NM simplex method; (c) PSO algorithm
Fig. 9. Experimental results of phase noise. (a) IE; (b) NM simplex method; (c) PSO algorithm
|
Table 1. System parameters
|
Table 2. IE of partial points

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20