
Xu Xinggui, Ran Bing, Yang Ping, Xian Hao, Liu Yong. Shape Object Matching Recognition of Turbulence Clutter Based on Improved Shape Context[J]. Laser & Optoelectronics Progress, 2020, 57(21): 210101
- Laser & Optoelectronics Progress
- Vol. 57, Issue 21, 210101 (2020)
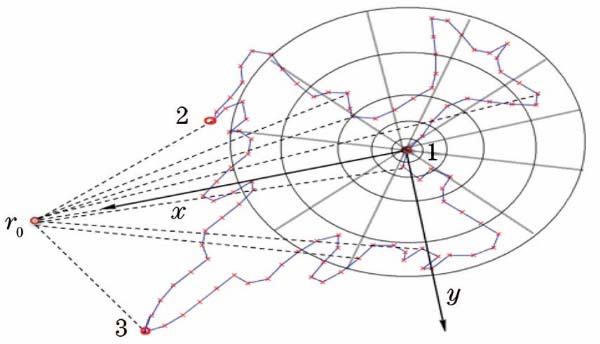
Fig. 1. Schematic of OSC description operator construction

Fig. 2. Feature histogram extracted by OSC descriptor. (a) Marking point 1; (b) marking point 2; (c) marking point 3
Fig. 3. Schematic of imposing edge continuity constraint
Fig. 4. Flow chart of algorithm implementation
Fig. 5. Simulation shape point sets under turbulence clutter scene. (a) Original image; (b) shape simultaneously degraded by rotation and deformation; (c) turbulence clutter degraded by deformation, outliers, and rotation; (d) strong turbulence clutter shapes degraded by deformation, outliers, and rotation
Fig. 6. Long distance imaging data. (a)(b) Image data in turbulent clutter scene; (c)(d) manual model shape point set of personal car and truck
Fig. 7. Average matching error and the experimental parameters
Fig. 8. Matching results of proposed method for deformable target ‘Fish’ in turbulent clutter scene. (a) Target matching results in both turbulent noise and rotating scene; (b) target matching results in turbulent noise scene
Fig. 9. Matching results of different methods for non-grid deformable target ‘Fu’ in turbulent clutter scene. (a) APM method [5]; (b) IDSC method[8]; (c) proposed method
Fig. 10. Matching results of different methods for grid deformable target ‘personal car’ in actual outfield turbulence clutter scene. (a) Acquired image and enlarged target; (b) contour shape point set target obtained by method in Ref.[19]; (c) APM method [5]; (d) IDSC method[8]; (e) proposed method
Fig. 11. Matching results of different methods for grid deformable target ‘truck’ in actual outfield turbulence clutter scene. (a) Acquired image; (b) contour shape point set target obtained by method in Ref.[19]; (c) APM method [5]; (d) IDSC method[8]; (e) proposed method
| |||||||||||||||||||||||
Table 1. Average matching errors and processing time of different methods operating on three-type targets
| ||||||||||||||||||
Table 2. Average matching errors and processing time of different methods operating on the two-type outfield turbulence-cluttered sequences

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20