
Guanyu Xu, Wei Yin, Ce Li, Yong Chen, Litian Feng, Dingfu Zhou. Research on high resolution range-gate adaptive technology of coherent wind lidar[J]. Infrared and Laser Engineering, 2021, 50(12): 20210187
- Infrared and Laser Engineering
- Vol. 50, Issue 12, 20210187 (2021)
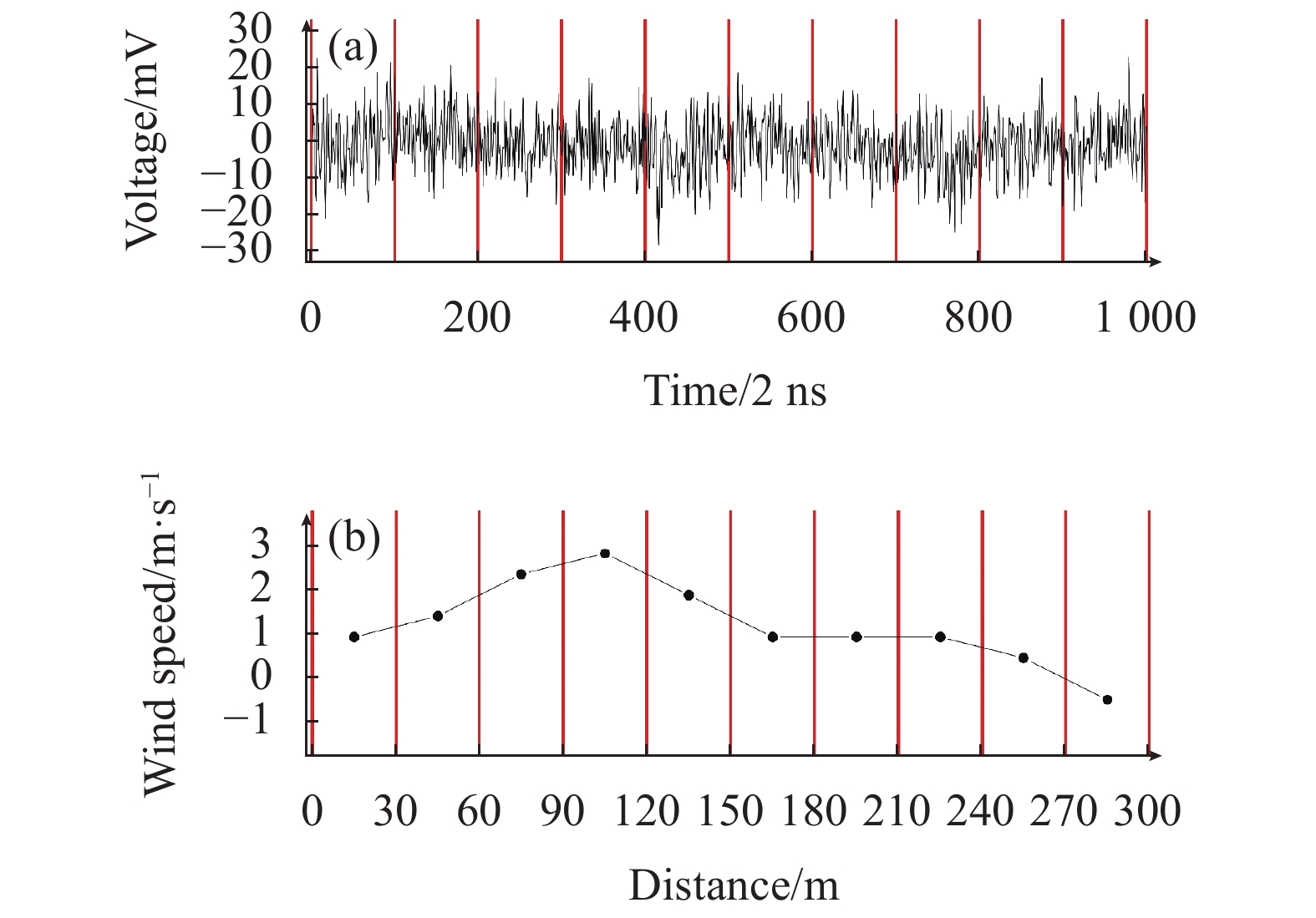
Fig. 1. Fixed range-gate method processing wind lidar signal. (a) Time domain signal is divided with fixed range-gate; (b) Calculation result of wind speed
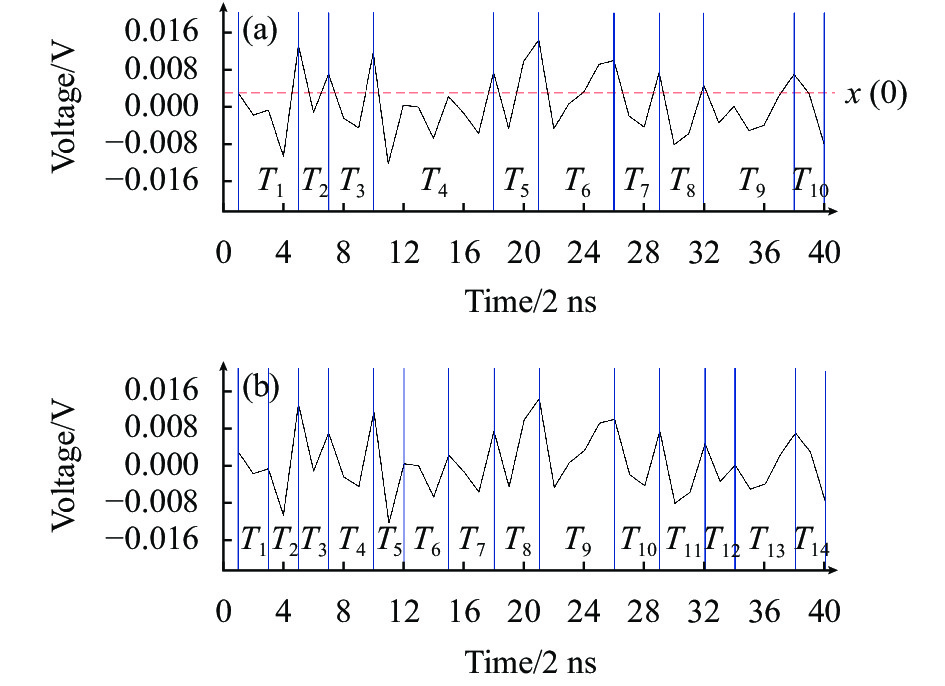
Fig. 2. Results of full cycle search. (a) Results of unimproved full cycle search algorithm; (b) Results of improved full cycle search algorithm
Fig. 3. Results of range-gate division. (a) Results of fixed range-gate division; (b) Results of adaptive range-gate division
Fig. 4. Curves of signal-to-noise ratio-average error
Fig. 5. Curve of number of full cycle-frequency error
Fig. 6. Curves of number of full cycle-range-gate length-frequency
Fig. 7. Schematic diagram of measurement experiment
Fig. 8. Target echo signal range-gate division. (a) Fixed range-gate dividing the turntable echo signal; (b) Adaptive range-gate dividing the turntable echo signal; (c) Fixed range-gate dividing the building echo signal; (d) Adaptive range-gate dividing the building echo signal
Fig. 9. Measurement error of turntable speed
Fig. 10. (a) Results of fixed range-gate division; (b) Results of adaptive range-gate division; (c) Comparison of wind speed measurement results
|
Table 1. Parameters of wind lidar system

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20