
Yiping Fan, Baozhen Ge, Lei Chen. Registration Algorithm for Differently Scaled Point Clouds Based on Artificial Bee Colony Optimization[J]. Laser & Optoelectronics Progress, 2023, 60(12): 1210023
- Laser & Optoelectronics Progress
- Vol. 60, Issue 12, 1210023 (2023)
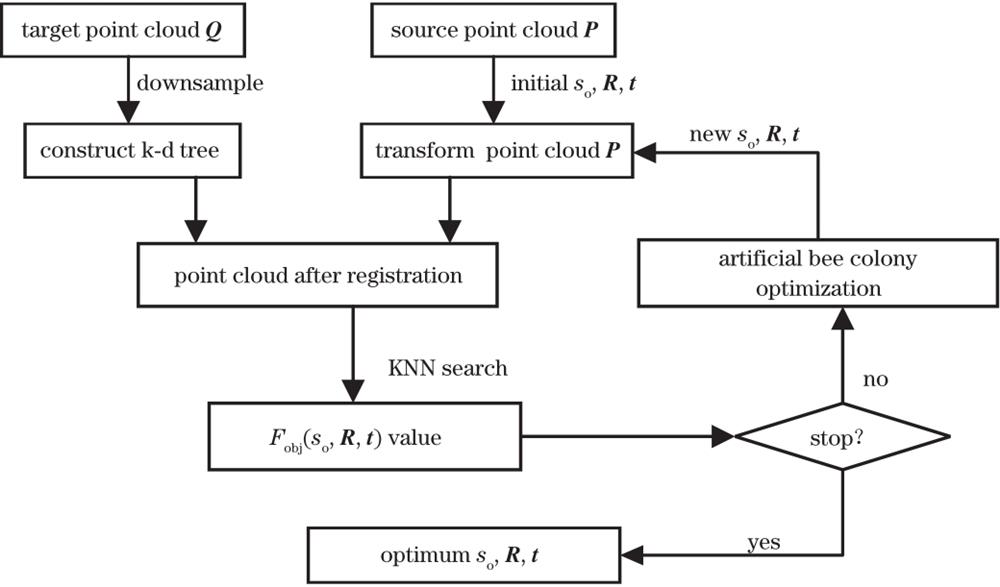
Fig. 1. Flowchart of proposed algorithm
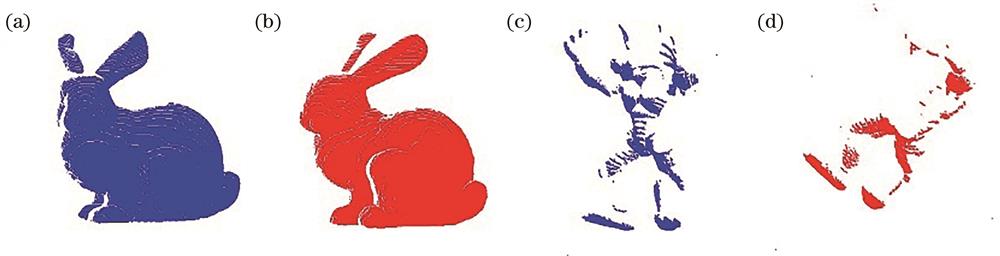
Fig. 2. Homologous point cloud data. (a) Bun000; (b) Bun045; (c) ArmadilloBack_0; (d) ArmadilloBack_30
Fig. 3. Cross-source point cloud data. (a) Bag_Kinect; (b) Bag_SFM; (c) Tsinghua gate_Lidar; (d) Tsinghua gate_SFM; (e) Life science building_Lidar; (f) Life science building_SFM
Fig. 4. Point clouds to be registered with different scaling factors. (a) Bunny, so=20; (b) Bunny, so=10; (c) Bunny, so=1.25; (d) Armadillo, so=20; (e) Armadillo, so=10; (f) Armadillo, so=1.25
Fig. 5. Registration results of various algorithms for Bunny point cloud under different scale factors. (a) EBABC-RS-IR; (b) ICP; (c) Scale-ICP; (d) CPD; (e) proposed algorithm
Fig. 6. Registration results of various algorithms for Armadillo point cloud under different scale factors. (a) EBABC-RS-IR; (b) ICP; (c) Scale-ICP; (d) CPD; (e) proposed algorithm
Fig. 7. Point cloud registration results under different noise. (a) Bunny, 20 dB; (b) Bunny, 25 dB; (c) Bunny, 30 dB; (d) Armadillo, 20 dB; (e) Armadillo, 25 dB; (f) Armadillo, 30 dB
Fig. 8. Relative initial state of cross-source point clouds to be registered. (a) Bag; (b) Tsinghua gate; (c) Life science building
Fig. 9. Local amplification effect of Bag registration
Fig. 10. Tsinghua gate point cloud registration results. (a) Main perspective; (b) prone perspective; (c) side perspective
Fig. 11. Life science building point cloud registration results. (a) Main perspective; (b) prone perspective; (c) side perspective
|
Table 1. Point cloud data information
|
Table 2. RMSE for each registration algorithm with different scaling factors
|
Table 3. Time for each registration algorithm with different scaling factors
|
Table 4. RMSE of the proposed algorithm under different noise
|
Table 5. Time of the proposed algorithm under different noise


Set citation alerts for the article
Please enter your email address

© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20