
Guiyang Zhang, Ju Huo, Ming Yang, Muyao Xue. Bidirectional Closed Cloud Control for Stereo Vision Measurement Based on Multi-Source Data[J]. Acta Optica Sinica, 2020, 40(19): 1915002
- Acta Optica Sinica
- Vol. 40, Issue 19, 1915002 (2020)
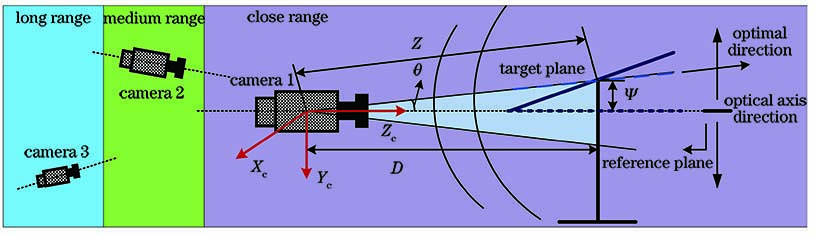
Fig. 1. Relationship between target plane and viewing angle of optical axis
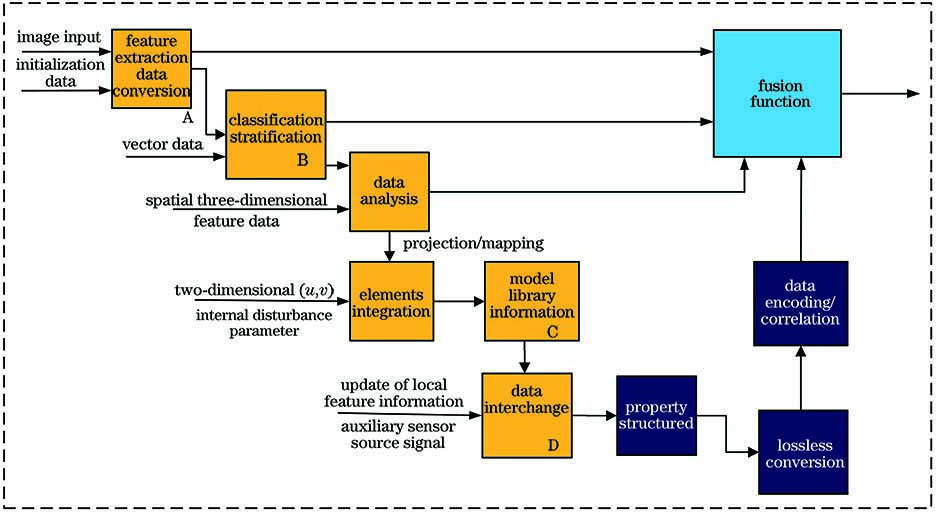
Fig. 2. Diagram of multi-source feature data fusion structure
Fig. 3. Bidirectional closed mode of visual measurement
Fig. 4. Plane point set distribution for large field of view simulation
Fig. 5. Pose measurement error under different noise levels. (a) Position measurement; (b) attitude measurement
Fig. 6. Actual measurement scene with large field of view. (a) Measuring equipment and layout; (b) enlarged view of camera and mark point
Fig. 7. Feature information in scene
Fig. 8. Statistical distribution of spatial point positioning reprojection errors. (a) Traditional binocular vision measurement method; (b) DLT method; (c) proposed method
Fig. 9. Results of traditional binocular vision unidirectional measurement mode. (a) 0°; (b) 5°; (c) 10°; (d) 15°; (e) 20°; (f) 25°; (g) 30°
Fig. 10. Results of bidirectional closed measurement mode. (a) 0°; (b) 5°; (c) 10°; (d) 15°; (e) 20°; (f) 25°; (g) 30°
Fig. 11. Pose measurement parameter error. (a) Attitude angle error; (b) position error
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 1. POI coordinates in traditional measurement modeunit: mm
| ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Table 2. POI coordinates in closed measurement modeunit: mm
|
Table 3. Information data type in closed measurement mode

Set citation alerts for the article
Please enter your email address
© Copyright 2018-2021 | Chinese Laser Press. All Rights Reserved 沪ICP备15018463号-20